Prefix
Changelog
Version 1.0 - July 2, 2026
- Revised <SC4> to provide clarity
- Updated <SG2a> and its red box to clarify that the rule only applies during the Match
- Updated <SG3> to clarify Endgame expansion limits
- Updated <SG4> to penalize only intentional remove of Scoring Objects, and to consider Scoring Objects resting on top of the Field Perimeter as being out of the Field
- Revised the wording of <SG9> to provide better interaction examples
- Updated <SG10> to clarify intent
- Rewrote <SG12> to change the hard limit on vertical expansion during the Endgame, to a soft limit with verbal warnings
- Added rule <SG13> to introduce Load Zone protections
- Revised <R24f> to add structurally non-homogeneous plastics to list of prohibited materials
- Added bullet points to <T6> regarding custom solutions for mounting Toggles on metal Field Perimeters and Alliance Station dimensions / positioning as permissable Field modifications
- Removed existing rule <VUG7> and rewrote it for VEX U Load Zone protections
- Added a new definition for Load Zone
- Updated Figure T-1 to properly display the parts considered to be part of the Toggle
- Updated Violation Notes for rules <SG4>, <SG9>, <SG10>, <SG12> and <SG13>
- Other minor typo / formatting fixes
Version 0.2 - June 4, 2026
- Updated a typo in the Game Design Philosophy to clarify that the Endgame is 10 seconds long
- Revised <SC2>, <SC3>, <SC4>, <SC5>, <SC8>, <SG9>, <SG10>, <RSC3>, <VUG6> and their corresponding figures for clarity, in regards to Pins that are Placed / Scored
- Updated <R11> to clarify intent
- Updated <R23a> to allow anodizing, painting, dyeing, or otherwise changing the color of any legal VEX parts (other than for official events held in mainland China)
- Updated <T6> to add white tape in place of blue/red tape for Load Zones as a permissible Field modification
- Revised tiebreakers in <T22>
- Added figures to Section 6 to show the starting configuration of a VEX U Head-to-Head Match
- Updated <VUG4> to clarify that both Cups and Pins may be introduced into the Loaders in VEX U Matches
- Added a note to <R11> and <VUR11> to clarify that the 55W drivetrain motor restriction does not apply to VEX U
- Added new drawings to Appendix A for Toggle starting orientation, and AprilTag numbering locations
- Added new definitions for Plowing, Possession and Scored to Appendix B
- Other minor typo / formatting fixes
Version 0.1 - April 27, 2026
- Initial release
Quick Reference Guide
Scoring Rules |
|
All scoring statuses are evaluated after the Match ends |
|
Placed Scoring Object criteria |
|
A Toggle is considered set to a color when it meets all of the following criteria |
|
Yellow Pin Ownership |
|
Autonomous Bonus criteria |
|
Autonomous Win Point criteria |
|
Specific Game Rules |
|
Starting a Match |
|
Horizontal expansion is limited |
|
Vertical expansion is limited |
|
Keep Scoring Objects in the Field |
|
Possession is limited to a maximum of one Pin and one Cup |
|
Don’t cross the Autonomous Line, and don’t interfere with your opponents’ actions |
|
Engage with the Midfield and Autonomous Line during the Autonomous Period at your own risk |
|
Scoring Objects can’t be removed from neutral or opponent-Alliance Goals |
|
Match Loads may be introduced during the Match under certain conditions |
|
Some rules change during the Endgame period |
|
Load Zones are protected during the Driver Controlled Period of the Match. |
|
Safety Rules |
|
Be safe out there |
|
Each Student Team member must have a completed participant release form on file |
|
Stay inside the Field |
|
Wear safety glasses |
|
General Rules |
|
Treat everyone with respect |
|
V5RC is a Student-centered program |
|
Use common sense |
|
All work must represent the skill level of the Students on the Team |
|
Each Student can only belong to one Team |
|
There is a difference between accidentally and willfully violating a Robot rule |
|
General Game Rules |
|
Only Drive Team Members, and only in the Alliance Station |
|
Hands out of the Field |
|
Match replays are allowed, but rare |
|
Keep your Robots together |
|
The red Alliance may choose to place last |
|
Controllers must stay connected to the Field |
|
Autonomous means “no humans” |
|
All rules still apply in the Autonomous Period |
|
Don’t destroy other Robots. But, be prepared to encounter defense |
|
Offensive Robots get the “benefit of the doubt” when judgment calls are required |
|
You can’t force an opponent into a penalty |
|
No Holding for more than a 3-count |
|
Use Scoring Objects to play the game |
|
Robot Skills Challenge Rules |
|
Standard rules apply in most cases |
|
Match play is different in Robot Skills Matches |
|
Scoring Robot Skills Matches |
|
Field setup for Robot Skills Matches |
|
Inspection Rules |
|
One Robot per Team |
|
Robots must pass inspection |
|
Robots must fit within an 18” x 18” x 18” volume |
|
Officially registered Team numbers must be displayed on Robot License Plates |
|
Let go of Scoring Objects after the Match |
|
Robots have one Brain |
|
Keep the power button or battery connection accessible |
|
Firmware |
|
Use a “Competition Template” for programming |
|
Motors are limited |
|
Subsystems 1 & 2 have a combined motor limit |
|
Electrical power comes from VEX batteries only |
|
Robots use VEXnet |
|
Give the radio some space |
|
One or two Controllers per Robot |
|
Robots are built from the VEX V5 system |
|
New VEX parts are legal |
|
Prohibited Items |
|
Certain non-VEX components are allowed |
|
Custom V5 Smart Cables are allowed |
|
A limited amount of tape is allowed |
|
Certain non-VEX fasteners are allowed |
|
Visual decorations are allowed |
|
A limited amount of custom plastic is allowed |
|
Pneumatics are limited |
|
The VEX Pressure Gauge is a required part if a Robot includes pneumatics |
|
Most modifications to non-electrical components are allowed |
|
No modifications to electronic or pneumatic components are allowed |
|
Tournament Rules |
|
Head Referees have ultimate and final authority on all gameplay and Robot ruling decisions |
|
Head Referees must be qualified |
|
Drive Team Members are permitted to immediately appeal a Head Referee’s ruling |
|
The Event Partner has ultimate authority regarding all non-gameplay decisions |
|
Be prepared for minor Field variance |
|
Fields may be repaired at the Event Partner’s discretion |
|
Fields at an event must be consistent with each other |
|
There are three types of Field control that may be used |
|
There are two types of Field Perimeter that may be used |
|
Qualification Matches follow the Match Schedule |
|
Each Team will have at least six Qualification Matches |
|
Qualification Matches contribute to a Team’s ranking for Alliance Selection |
|
Qualification Matches tiebreakers |
|
Small Tournaments have fewer Alliances |
|
Send a Student representative to Alliance Selection |
|
Each Team may only be invited once to join one Alliance |
|
Elimination Matches follow the Elimination Bracket |
|
Elimination Matches are a blend of “Best of 1” and “Best of 3” |
|
Ties in Elimination Matches lead to limited rematches |
|
Skills Match Schedule |
|
Skills Challenge Fields do not require the same modifications as the Head-to-Head Fields |
|
Skills Rankings at events |
|
Skills Rankings globally |
|
Robot Skills at League Events |
|
VEX U Game Rules |
|
Different Robot starting sizes |
|
Some electronic devices may be in motion or moving at the beginning of the Match |
|
Different availability of Loaders |
|
Different scoring during the Autonomous Period |
|
Different Autonomous Win Point criteria |
|
Different Load Zone protection |
|
VEX U Robot Skills Challenge Rules |
|
VEX U Robot Skills Matches are set up differently than V5RC Robot Skills Matches |
|
Teams are permitted to use both Robots in their VEX U Robot Skills Matches |
|
Both Robots must start the Robot Skills Match in legal starting positions for the red Alliance |
|
VEX U Tournament Rules |
|
VURC Head-to-Head Matches will be played 1-Team vs. 1-Team |
|
Qualification Matches will be conducted in the same manner as in a V5RC Tournament |
|
Elimination Matches will be conducted in the same manner, but without an Alliance Selection |
|
The Autonomous Period at the beginning of each Head-to-Head Match will be 30 seconds |
|
The Driver Controlled Period is shortened to 90 seconds |
|
VEX U Student eligibility |
|
VURC Tournaments have fewer Teams in Elimination Matches |
|
VEX U Robot Rules |
|
Teams may use any official VEX Robotics products, other than the exceptions listed below |
|
Fabricated Parts may be made by applying the following processes to Raw Stock |
|
Fabricated Parts must be made from legal Raw Stock |
|
The following material types are not considered Raw Stock |
|
Fabricated Parts cannot be made from Raw Stock which poses a safety or damage risk |
|
Fabricated Parts must be made by Team members |
|
Teams may use commercially-available springs on their Robots |
|
Teams may use commercially available fastener hardware on their Robot |
|
Each Robot must utilize exactly one (1) V5 Robot Brain and at least one (1) V5 Robot Radio |
|
There is no restriction on the number of V5 Smart Motors |
|
There is no restriction on Sensors, External Processors, or Additional Electronics |
|
Commercially available Electromechanical Assemblies are not legal |
|
Teams may utilize an unlimited amount of the following pneumatic components |
|
Teams may use commercially available bearings on their Robot |
|
Section 1 - Introduction
About the Game Manual
The VEX V5 Robotics Competition Game Manual is the most authoritative source of information for the VEX V5 Robotics Competition. Contained within this document are all of the rules, boundaries, constraints, and other relevant information you will need to properly understand and play this year’s game.
This manual is:
- A technical reference document for gameplay, Robot construction, and event operation
- A binding set of rules for Teams, coaches, referees, Event Partners, and all other volunteers and participants to adhere to
- The primary source of truth for all things related to the VEX V5 Robotics Competition
This manual is not:
- A strategy guide to score the most points
- An instruction set to build the best Robot
- A replacement for referee training, Event Partner training, or other event procedure
How to Read the Game Manual
The rules in this game manual are intended to work together to create a system of constraints. These rules are not intended to be understood independently of one another or in isolation from other information contained in this document. Many situations may require Teams, referees, or other volunteers to use logic from multiple places in the manual to properly form an interpretation. It is critical that the entire manual is read and understood, not just parts.
Information in the game manual is presented in the following ways:
Definitions in Appendix B establish the meaning of a term with regards to this document. Sometimes, these definitions may not perfectly match a more commonly accepted dictionary definition. In that case, the VEX definition takes precedence. If there is no VEX definition for a term, it can be reasonably assumed that a dictionary definition can be used.
General Rules establish the baseline rules for competition that Teams must adhere to at all times. These include, but are not limited to, conduct at an event, roster eligibility, competition integrity, and authority and enforcement.
General Game Rules begin to outline the rules that Teams must follow in every VEX game, not just the rules specific to this season’s game. Many of these rules do not change from year to year, and help prevent the game from devolving into immediate chaos.
Scoring Rules define how points are earned and evaluated.
Specific Game Rules describe what Robots and Drive Team Members may and may not do during a Match, specifically for this season’s game. These rules are subject to change from year to year, depending on how the game is designed and meant to be played.
Robot Rules define how Robots may be built and configured.
Tournament Rules describe how competitions are run, and how Teams are ranked at events.
Some rules also reference Violation Notes that are located in Appendix C. These notes provide additional guidance on enforcement, escalation, or special circumstances. If a rule doesn’t include a cross-reference to Violation Notes, standard Violation definitions apply. See Appendix C for information about rule Violations and penalties.
There are also red boxes of text placed in some areas of the game manual. These are intended to provide further clarification and guidance in places that the Game Design Committee has deemed may benefit from things being said a different way, or presented slightly differently. Red Boxes are meant to be supplements to, not replace, rules or definitions.
Game Manual Updates
This manual will have a series of “major” and “minor” updates over the course of the season. Each version is official and must be used in official V5RC events until the release of the next version, upon which the previous version becomes void.
The latest version of the Game Manual can always be found at https://link.vex.com/docs/26-27/v5rc/game-manual.
Known major release dates are as follows:
Release Date |
Effective Date |
Version # |
Details |
April 27, 2026 |
April 27, 2026 |
Version 0.1 |
Initial game release |
May 14, 2026 |
May 14, 2026 |
N/A |
Official Q&A system opens |
June 4, 2026 |
June 11, 2026 |
Version 0.2 |
Minor typographical errors or formatting issues found in the initial release, with very few rule changes expected |
July 2, 2026 |
July 9, 2026 |
Version 1.0 |
May include gameplay or rule changes inspired by input from the official Q&A system and the VEX community |
August 6, 2026 |
August 13, 2026 |
Version 1.1 |
Clarification / minor update |
September 3, 2026 |
September 10, 2026 |
Version 2.0 |
May include gameplay or rule changes inspired by early-season events |
October 8, 2026 |
October 15, 2026 |
Version 2.1 |
Clarification / minor update |
December 3, 2026 |
December 10, 2026 |
Version 2.2 |
Clarification / minor update |
January 28, 2027 |
February 4, 2027 |
Version 3.0 |
May include gameplay or rule changes inspired by mid-season events |
March 25, 2027 |
April 1, 2027 |
Version 4.0 |
May include gameplay or rule changes pertaining specifically to the VEX Robotics World Championship |
In addition to these known major updates, there may also be unscheduled updates released throughout the season if deemed critical by the Game Design Committee.
Any scheduled or unscheduled updates will always be released on a Thursday, no later than 5:00 PM CST (11:00 PM GMT). These updates will be announced via the VEX Forum, automatically pushed to the VEX V5 Hub app, and shared via VEX Robotics social media & email marketing channels. Once announced, the new version of the Game Manual will be immediately available at the link above.
Generally, Game Manual updates, scheduled or unscheduled, will include a grace period before the updated rules go into effect for competitions. See the release table above for specific dates. This grace period does not apply to the Version 0.1 Release, which serves as the initial rule set for the season.
Any events that begin before the 7-day grace period has ended must continue using the rules from the previous Game Manual Release. This policy ensures fairness and consistency, allowing Teams to adapt their strategies and gameplay accordingly before the changes are enforced in official competitions.
Once a manual update occurs, the previous version will be re-uploaded with an “Obsolete” watermark. Those will be found at https://link.vex.com/docs/26-27/v5rc/game-manual-obsolete and will be available to reference through the rest of the season.
The Game Design Committee reserves the right to enforce critical updates to the Game Manual as effective immediately upon release, if we feel that the changes are critical for competitive integrity, safety, and/or other extenuating circumstances.
Multi-week league events (or similar) that cross over a grace period should use the version of the Game Manual that is in effect at the beginning of each league session. Leagues should update to new versions of the Game Manual between sessions as appropriate.
The Q&A System
When first reviewing a new robotics game, it is natural to have questions about situations which may not be immediately clear. Navigating the Game Manual and seeking out answers to these questions is an important part of learning a new game. In many cases, the answer may just be in a different place than you first thought - or, if there is no rule explicitly prohibiting a gameplay strategy, then that usually means it is legal!
However, if a Team is still unable to find an answer to their question after closely reviewing the relevant rules, then every Team has the opportunity to ask for official rules interpretations and clarifications in the VEX Robotics Question & Answer System. These questions may be posted by a Team’s Adult representative via the events.vex.com account that is associated with that Team.
All responses in this Q&A system should be treated as official rulings from the VEX Robotics Game Design Committee, and they represent the correct and official interpretation of the VEX V5 Robotics Competition rules. The Q&A system is the only source besides the Game Manual for official rulings and clarifications, and is functionally an extension of the Game Manual. Unlike Game Manual updates, Q&A rulings are effective immediately upon release.
The VEX V5 Robotics Competition Question & Answer System will open May 14th, 2026.
Before posting on the Q&A system, be sure to review the Q&A Usage Guidelines:
- The Q&A system is for rules clarifications only.
- Only registered Teams, certified Event Partners, and certified V5RC Head Referees can post questions.
- Read and search this Game Manual before posting.
- Read and search existing Q&As before posting.
- Quote the applicable rule from the latest version of this Game Manual in your question.
- Make a separate post for each question.
- Use specific and appropriate question titles.
- Questions will (mostly) be answered in the order they were received.
- This system is the only source for official rules clarifications.
- The Game Design Committee cannot and will not overrule a Head Referee’s decision.
If there are any conflicts between the English-language PDF of the Game Manual and other supplemental or translated materials (e.g., referee training materials, the V5RC Hub app, the game reveal video, a translated game manual, etc.), the most current version of the English-language PDF of the Game Manual takes precedence.
Similarly, it can never be assumed that definitions, rules, or other materials from previous seasons apply to the current game. Q&A responses from previous seasons are not considered official rulings for the current game. Any relevant clarifications that are needed should always be re-asked in the current season’s Q&A.
Hierarchy of Information
There is no rule in this game manual that is more important than another rule. All rules are intended to be enforced with the same vigor.
The following hierarchy applies when determining official rulings while using information from beyond the Game Manual:
- The most current English-language PDF of this Game Manual
- Official rulings published in the VEX Robotics Question & Answer (Q&A) system
- All other supplementary documents, policies and media
The latest version of the game manual supersedes all previous versions once effective (see the Game Manual Updates section, for more information). If discrepancies exist between this manual and other materials (videos, apps, translations, training documents), the latest version of the English-language PDF version of this manual takes precedence.
Section 2 - The Game
VEX V5 Robotics Competition Override: A Primer
VEX V5 Robotics Competition Override is played on a 12’ x 12’ square Field, set up as illustrated in the figures throughout this manual.
In Head-to-Head Matches, two (2) Alliances — one (1) “red” and one (1) “blue” — composed of two (2) Teams each, compete in Matches consisting of a fifteen (0:15) second Autonomous Period followed by a one minute and forty-five second (1:45) Driver Controlled Period.
The object of the game is to attain a higher score than the opposing Alliance by stacking Pins and Cups on Goals, setting Toggles to your Alliance color, and ending the Match with your Robot in the contested Midfield.
An Autonomous Win Point is awarded to any Alliance that completes a set of assigned tasks by the end of the Autonomous Period.
An Autonomous Bonus is awarded to the Alliance that has the most points at the end of the Autonomous Period.
Teams may also compete in Robot Skills Matches, where one (1) Robot tries to score as many points as possible. See Section 3 for more information.
At the VEX U Collegiate level, Teams play in a modified Tournament with a 30-second Autonomous Period and additional Robot build challenges. See Section 6.
Field Overview
The V5RC Override Field consists of the following:
- 56 Cups
- 20 Match Loads
- 24 that start the Match in predetermined locations on the Field (gray side up)
- 12 that start the Match in predetermined locations on the Field (clear side up)
- 63 Pins
- 4 red/blue that start the Match in predetermined locations
- 20 red/yellow
- 2 Preloads
- 10 Match Loads
- 8 that start the Match in predetermined locations
- 20 blue/yellow
- 2 Preloads
- 10 Match Loads
- 8 that start the Match in predetermined locations
- 19 yellow/yellow
- 2 Match Loads
- 17 that start the Match in predetermined locations
- 9 Goals
- 4 Alliance colored
- 2 red
- 2 blue
- 5 neutral colored
- 4 short
- 1 tall
- 4 Alliance colored
- 4 Toggles
- 4 Loaders, two adjacent to each Alliance Station
Note: The illustrations in this section of the Game Manual are intended to provide a general visual understanding of the game. Some figures may highlight or change the appearance of certain Field Elements and Scoring Objects to emphasize or clarify intent.
Teams should refer to official Field specifications, found in Appendix A, for exact Field dimensions, a full Field bill of materials, and exact details of Field construction.
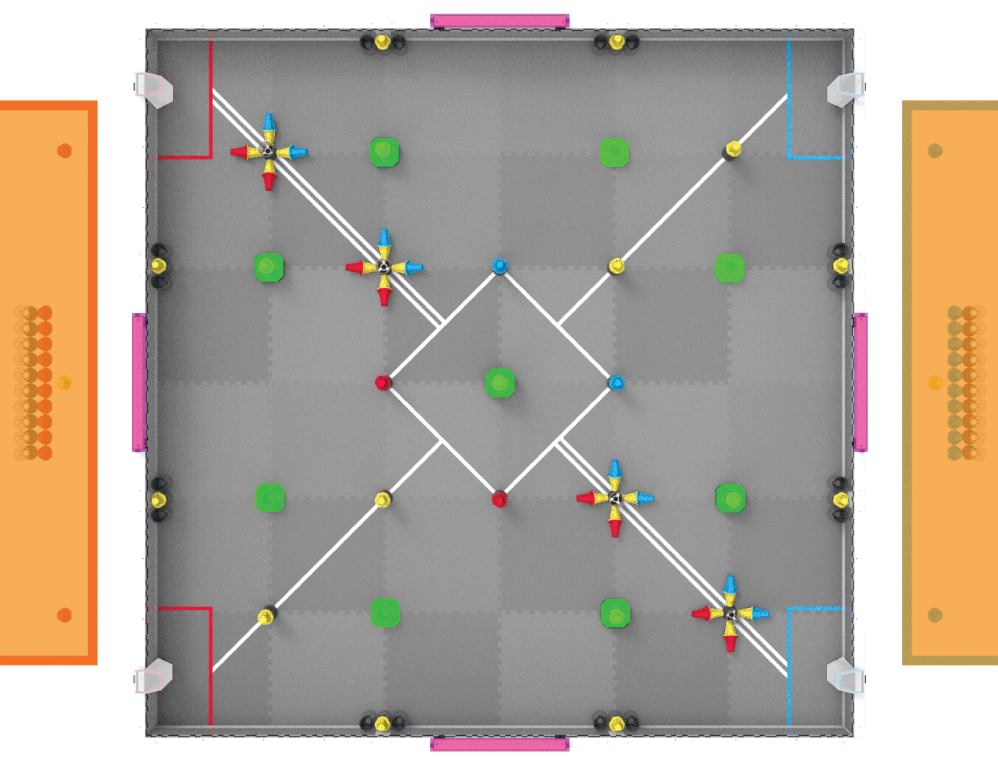
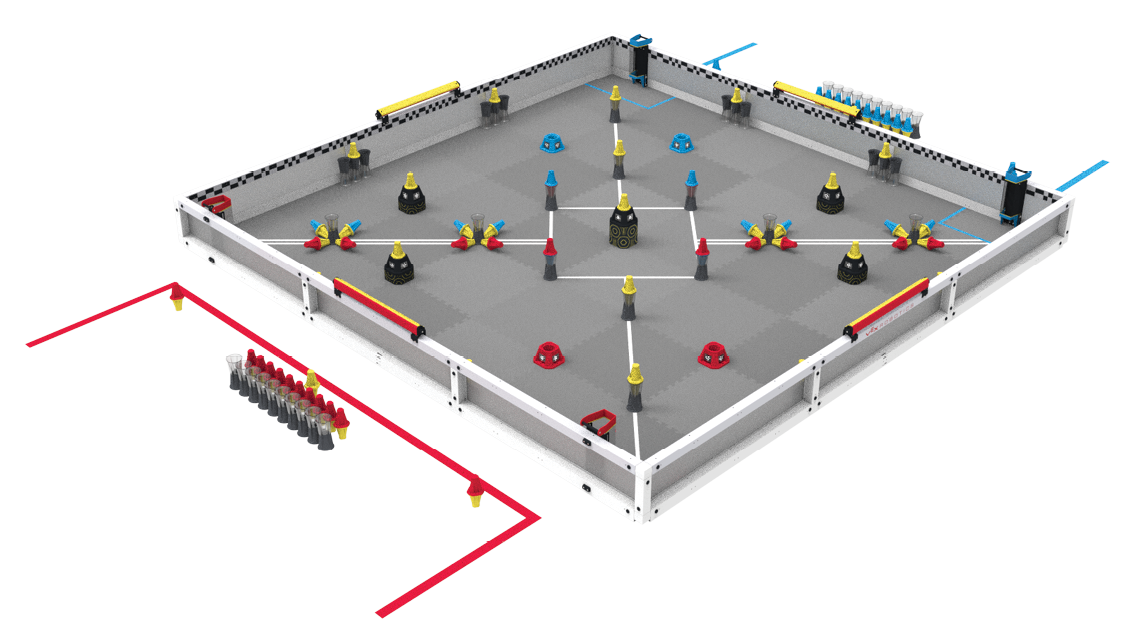
Figure FO-1: An overhead view of the V5RC Override Field, with Alliance Stations (orange), Loaders (white), Toggles (pink), and Goals (green) highlighted.
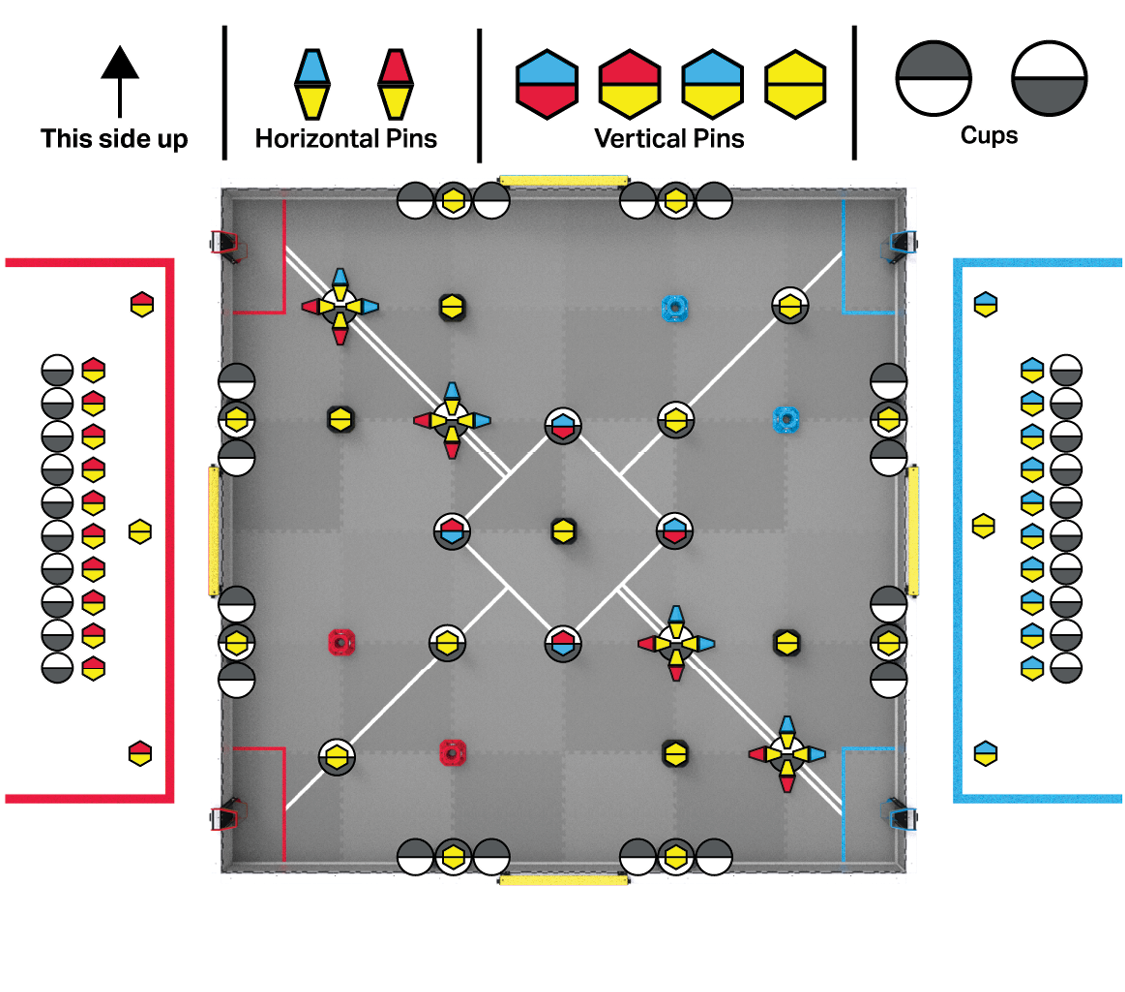
Figure FO-2: An overhead view of the V5RC Override Field in its starting configuration, with icons representing orientation of Scoring Objects.
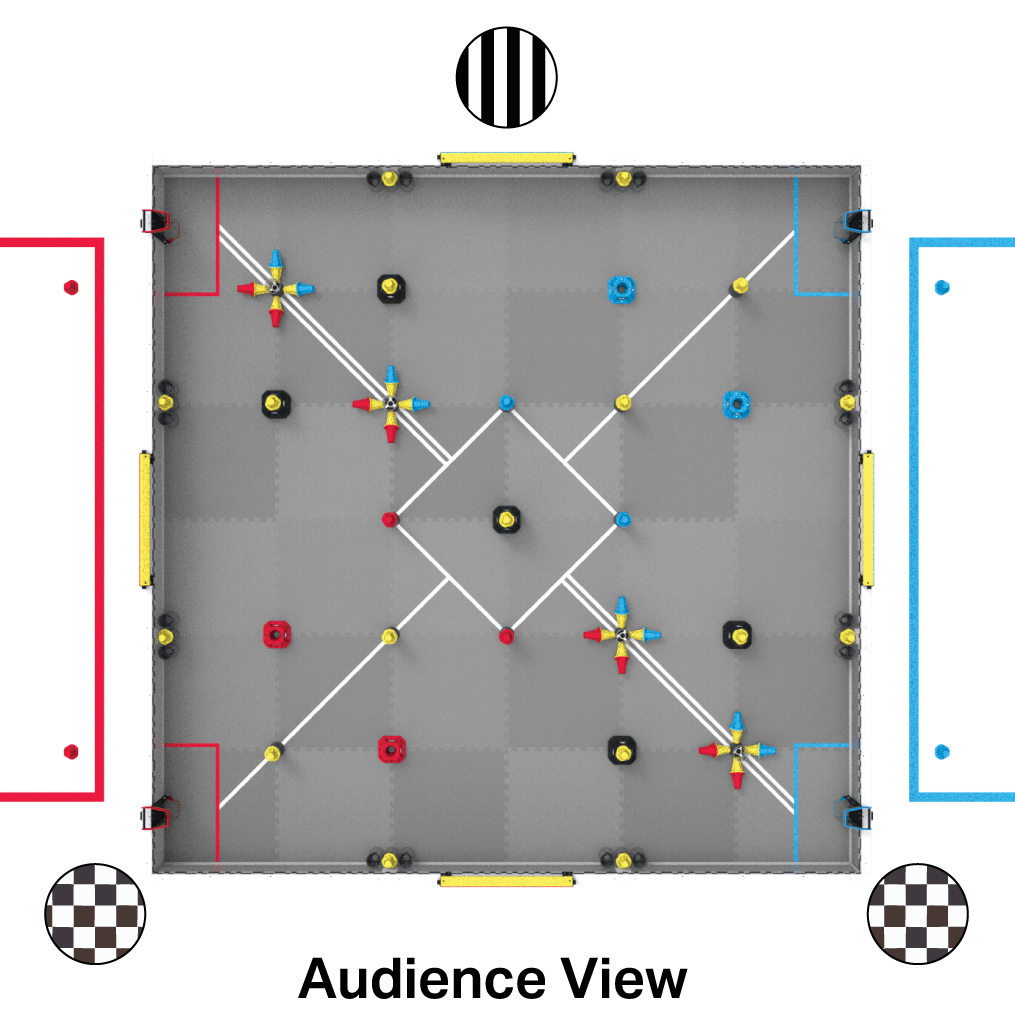
Figure FO-3: The recommended locations of the Head Referee (black & white stripes), and Scorekeeper Referees (black & white checkerboard).
Game Design Philosophy - A Letter from the GDC
We want to take the opportunity to explain how this game was designed and what kind of gameplay we expect to see during the season. This section also points out parts of the game that we will watch closely in case updates are needed.
This is not a rules section. It does not add any new rules. Instead, it helps you understand the purpose of the game and what we as designers had in mind.
What This Game is About & Scoring
Override is a game that focuses on stacking and teamwork. We intend for Teams to work together with their Alliance partners to assemble stacks, gain points using Scoring Objects, and control Toggles to outscore their opponents.
Because of this, success in the game is not just about building a good Robot. It also depends on how well you:
- Communicate with your partner
- Plan your strategy
- Time your actions during a Match
Teams that coordinate well and make smart decisions will have an advantage.
The game is designed so that most points come from constructive actions, such as:
Interaction with the opposing Alliance is still an important part of the game. However, Matches cannot be dominated by tearing down what the other Alliance has built. Some defense and disruption is expected, but the main focus should stay on building and scoring.
If strategies that focus mostly on preventing stacks become too common, the Game Design Committee may consider making changes to ensure the game remains interesting with many strategy choices. We will look at how often these strategies are used and how they affect gameplay compared to our intentions.
Large Point Swings with Toggles and Yellow Pins
The scoring values in Override are designed to encourage dynamic strategy and decision making. Because of this, it is possible for actions like controlling Toggles or scoring yellow Pins to create large point swings during a Match.
These moments can be exciting, but they should not become the only way to win. Teams should still have multiple viable strategies, including building stacks and competing in the Endgame.
We will monitor how these point swings impact Matches throughout the season. If they begin to outweigh other scoring opportunities or reduce strategic variety, the Game Design Committee may adjust point values to maintain a balanced and engaging game.
The Endgame: Final 10 Seconds
The last 10 seconds of the Match are designed to feel more intense and competitive. During this time, the game shifts to a “king of the hill” style challenge in the Midfield. This section of the Match will likely include increased Robot interaction. As such:
- Positioning and timing become critical
- Robot durability matters more
Teams should expect more crowded and contested conditions than earlier in the Match.
At the same time, there are still rules in place (like limits on how Robots can expand) to help prevent issues such as tipping over or getting tangled with other Robots. If the Endgame consistently leads to problems like Robots getting stuck, tipping too often, or not being able to recover, the Game Design Committee may adjust rules to keep Matches fair and playable.
Using Sensors in the Game
Override is a game where sensors can be very helpful. Tools like AI Vision Sensors and Optical Sensors can help your Robot :
The Game Design Committee will work to support sensor use through Field and game design. However, real-world conditions are not always perfect. Lighting and object placement may vary. Because of this, Teams should design and code their Robots so their sensors can handle small changes and still work reliably during a Match.
In addition, Robot rules will continue to be reviewed to make sure the game stays fair throughout the season. One important focus is preventing Teams from building Robots that could interfere with sensors in unfair ways like intentionally trying to confuse sensors or adding parts that look like Field Elements.
Making sure all Teams can rely on their sensors to work as expected is an important part of fair competition.
Have a great season!
- The VEX V5 Robotics Competition Game Design Committee
Scoring
12 Points |
|
5 Points |
|
10 Points |
|
8 Points |
<SC1> All scoring statuses are evaluated after the Match ends. Scores are calculated five seconds after the Match ends, or once all Scoring Objects, Field Elements, and Robots on the Field come to rest, whichever comes first.
- This 5-second delay is intended to be the only permitted “benefit of the doubt” for last-second scoring actions. If an object or Robot is still in motion and “too close to call” between two states at the 5-second mark, then the less advantageous of the two states should be awarded to the Robot (s) in question. A Robot which is breaking the plane of the Midfield but slowly droops down and away from the Midfield at five (5) seconds would not be considered in the Midfield.
- At the end of the Match, the on-screen timer displayed by Tournament Manager will hold the current Match information and “0:00” for five (5) seconds before moving to queue the next Match. This should be the primary 5-second visual cue used by Teams and Head Referees.
- This 5-second delay is only intended to be a “benefit of the doubt” grace period, not an extra five seconds of Match time. Robots which are designed to strategically exploit this grace period will receive a Minor Violation, and any post-Match movement will not be included in score calculation (i.e., the Match will be scored as it was at 0:00).
- Referees should avoid contacting or moving Robots and/or Scoring Objects as much as possible while evaluating scoring statuses. If an object must be moved to evaluate the status of another object, its status must be agreed upon by all Teams and the Head Referee, and noted or recorded, before it is moved.
- Referees must record counts based on verified scoring statuses evaluated after the Match, using final positions of Scoring Objects, Field Elements, and Robots. Point considerations used to determine whether a Violation is Match Affecting (e.g., specified in Violation Notes) should NOT be added to or deducted from the actual score, and points scored during a Violation should not be deducted from a score.
<SC2> Placed Scoring Object criteria.
- A Pin is considered Placed if it meets all of the following criteria:
- A Cup is considered Placed if it meets the following criteria:
In the context of <SC2>, nested means that one half of a Pin is partially or completely contained within the inner volume of the Cup. In other words, the Pin is breaking an imaginary plane at the opening of a Cup, in any way. Robot contact does not matter for the purposes of <SC2>, and a Robot that is contacting or Possessing a Pin that still meets the criteria presented in <SC2> does not negate the Placed status, provided no other rules are broken (particularly <SG6>.

Figure SC2-1: The Scoring Objects stacked in the Goal all count as Placed, as they are all at least partially nested with the Goal and/or other Placed Scoring Objects.
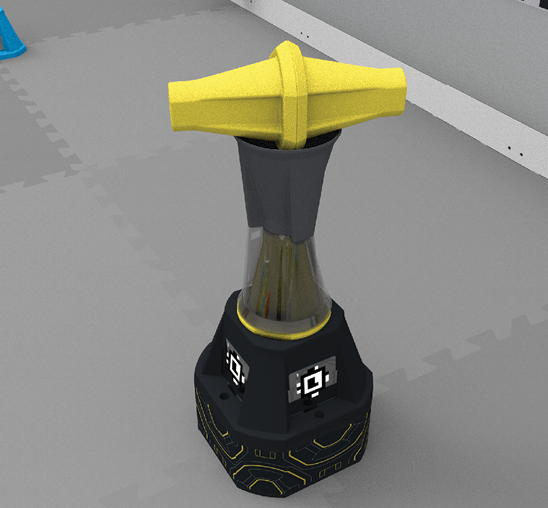
Figure SC2-2: The Pin resting on top is partially nested with the Cup, but the Pin is not considered Placed since that half of the Cup contains more than one Pin half.
<SC3> Each Pin consists of two halves. Each Placed Pin can have zero, one or two Scored halves. To count as Scored for the corresponding Alliance, the half of the Placed Pin must remain fully visible (i.e., cannot be partially or fully nested inside the opaque half of a Cup).
- Each visible red half of a Placed Pin counts as a Scored red Pin, earning points for the red Alliance.
- Each visible blue half of a Placed Pin counts as a Scored blue Pin, earning points for the blue Alliance.
- Each visible yellow half of a Placed and Owned Pin counts as a Scored yellow Pin, earning points for the Alliance that Owns the Pin. (See <SC5>.)
<SC4> A Toggle is considered set to a color when it meets all of the following criteria:
- The Toggle must be fully seated, such that there is a face of the Toggle in contact and parallel with its mounts on the Field Perimeter at rest. (see Figure SC5-1)
- The Toggle is not in contact with a Robot from either Alliance.
If a Toggle is not considered set to a color, it is considered a neutral (yellow) Toggle by default, and neither Alliance receives Ownership of the yellow Pins Placed in that Quadrant. While the Toggle has infinite potential orientations, only three discrete orientations are considered "set" states.
<SC5>Yellow Pin Ownership. Each Placed Pin with one or more yellow halves can be Owned by an Alliance.
- A yellow Pin Placed in a Quadrant is Owned by an Alliance if the Toggle in that Quadrant is set to the Alliance's color. If the Toggle is set to yellow, Placed yellow Pins in that Quadrant are not Owned and do not score points. (See <SC3>.)
- A yellow Pin Placed in the Midfield is Owned by the Alliance that ends the Match with a greater number of Robots in the Midfield. (See <SC6>.)
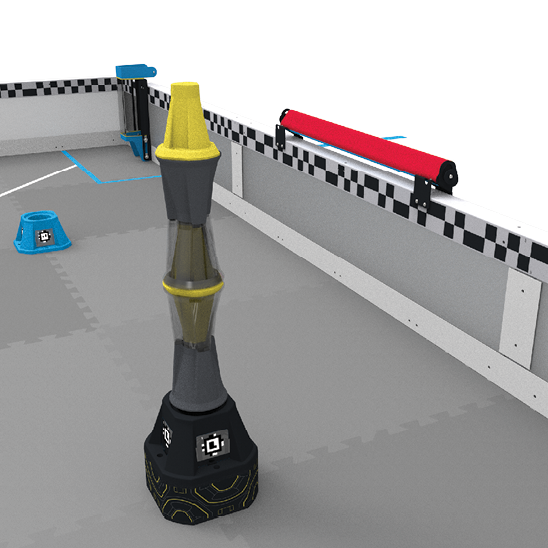
Figure SC5-1: This Quadrant's Toggle is set to red, so yellow Pins Placed in this Quadrant's Goals are Owned by the red Alliance.
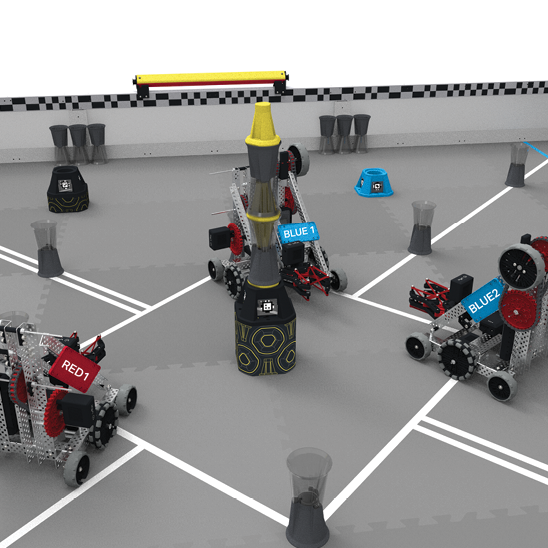
Figure SC5-2: The blue Alliance has more Robots in the Midfield at the end of the Match, so yellow Pins Placed in the Midfield Goal are Owned by the blue Alliance.
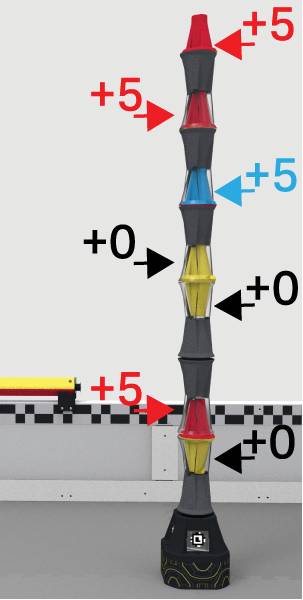
|
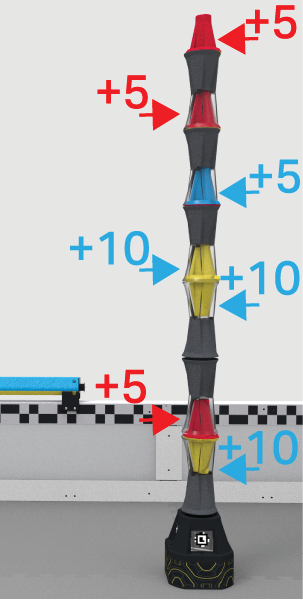
|
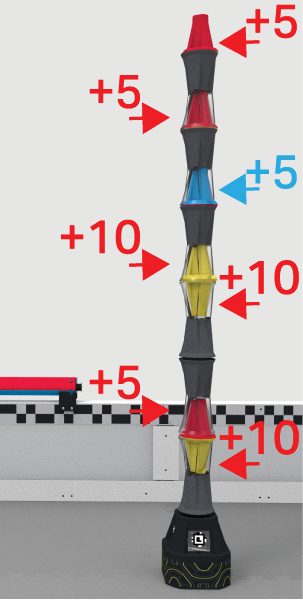
|
Toggle: Yellow |
Toggle: Blue |
Toggle: Red |
Red Pins: 15 points |
Red Pins: 15 Points |
Red Pins: 15 Points |
Blue Pins: 5 Points |
Blue Pins: 5 Points |
Blue Pins: 5 Points |
Yellow Pins: 0 Points |
||
|
Total Red : 15 Points / Blue : 5 Points |
Total Red : 15 Points / Blue : 35 Points |
Total Red : 45 Points / Blue : 5 Points |
<SC6> A Robot counts as being in the Midfield if any part of the Robot is within the infinite 3D vertical projection of the Midfield at the end of the Match.
<SC7> Scoring of the Autonomous Bonus is evaluated immediately after the Autonomous Period ends.
- Points for ending the Autonomous Period in the Midfield are not included in the calculation of an Alliance’s score for the purposes of determining the Autonomous Bonus.
- If the Autonomous Period ends in a tie, including a zero-to-zero tie, each Alliance will receive an Autonomous Bonus of six (6) points.
- Any Violations, Major or Minor, committed during the Autonomous Period will result in the Autonomous Bonus being automatically awarded to the opposing Alliance. See <GG13>.
- Per rule <GG13>, if both Alliances commit Violations during the Autonomous Period, then no Autonomous Bonus will be awarded.
This rule is applied differently for VEX U. See Rule <VUG5>.
<SC8> An Autonomous Win Point is awarded to any Alliance that ends the Autonomous Period with all of the following tasks completed, and that has committed no Violations during the Autonomous Period :
- At least seven (7) Pins Scored for your Alliance. (Does not include Pins Scored in Quadrants on the opposing side of the Autonomous Line )
- At least three (3) Goals each contain at least two (2) Pins Scored for your Alliance. (Does not include Goals in Quadrants on the opposing side of the Autonomous Line )
- Neither Robot is contacting the Field Perimeter
Autonomous Win Point criteria will be slightly modified for events which qualify directly to the World Championship (e.g., Event Region Championships and Signature Events) and may be further modified for the World Championship.
The modified criteria for events which qualify directly to the World Championship will be released in the September 3, 2026, Game Manual update. Any Championship-qualifying events held prior to September 10, 2026, will use the standard criteria listed in this rule.
The modification(s) will be minor, and will be intended to provide an increased challenge over the criteria listed above. For example, one possibility could be “At least eight (8) Pins Scored” instead of seven (7) and/or “At least four (4) Goals” instead of three (3). The standard criteria for all other events will not change.
This rule is applied differently for VEX U. See Rule <VUG6>.
Specific Game Rules
<SG1> Starting a Match. Prior to the start of each Match, each Robot must be placed such that it meets all of the following criteria:
- No larger than 18” (457.2 mm) long by 18” (457.2 mm) wide by 18” (457.2 mm) tall.
- Not contacting any Scoring Objects other than a maximum of one (1) Preload. See rule <SG5>.
- Not contacting Goals, Loaders, Load Zones, or Toggles.
- Not contacting any other Robots, and not sharing a Quadrant with another Robot.
- Completely stationary (i.e., no motors or other mechanisms in motion).
- Contacting the Field tiles and Field Perimeter on their Alliance’s side of the Autonomous Line.
Note: Using external influences, such as Preloads or the Field Perimeter, to maintain a Robot's starting size is only acceptable if the Robot would still satisfy the constraints of <R3> and pass inspection without these influences.
This rule has additional Violation notes. See Appendix C.
Clause A of this rule is applied differently for VEX U. See Rule <VUG1> and <VUG3>.
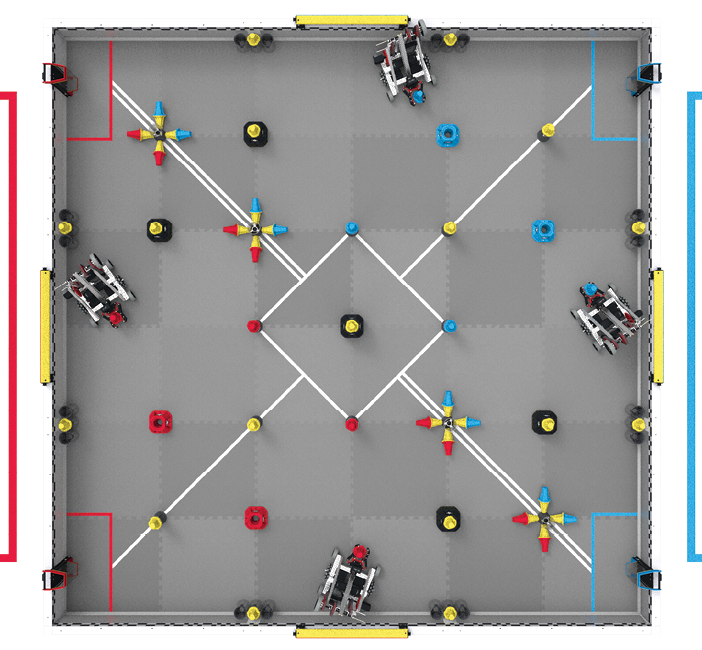
Figure SG-1: An overhead view of the Field, with four Robots in legal starting positions.
<SG2> Horizontal expansion is limited. Once the Match begins, Robots may expand horizontally beyond the starting size limit within the following criteria:
- The Robot can never be larger than 24” wide or 24” long at any point during the Match (must fit within a 24”x24” square horizontal footprint).
Teams should be aware that Robots may incidentally expand horizontally while extending vertically (e.g., mechanisms that arc, swing, or deploy upward). Teams must be prepared to demonstrate that their Robot does not exceed the maximum size constraint of 24" x 24" at any point during a Match due to either physical or programmed limitations, including while any vertical expansion mechanisms are in use.
This rule has additional Violation notes. See Appendix C.
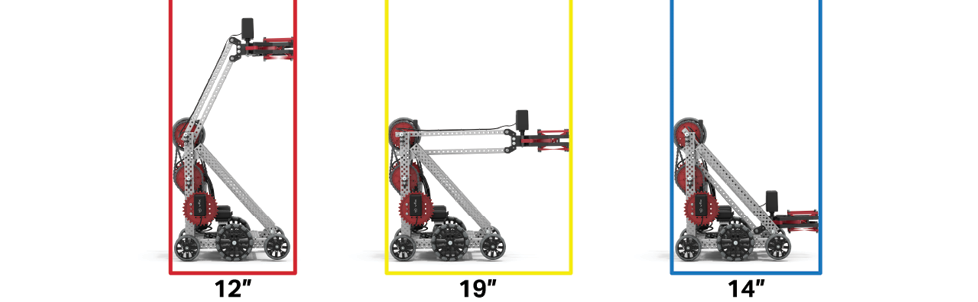
Figure SG-2: A demonstration of how the size of the Robot may change horizontally through the course of a vertical expansion.
<SG3> Vertical expansion is limited. Once the Match begins, Robots may expand vertically beyond the starting size limit, but no part of the Robot may exceed an overall height of 50” at any point during the Match (must always be able to fit within a hypothetical 50” vertical sizing box). For exceptions to this rule involving Robots in the Midfield during the Endgame period, see <SG12>.
<SG4> Keep Scoring Objects in the Field. Teams may not intentionally remove Scoring Objects from the Field. A Scoring Object that leaves the Field during Match play will be returned to the Field in a location near where it left, in contact with the Field tiles and the Field Perimeter but no other Field Elements or Scoring Objects and no Robots. Volunteers should return Scoring Objects to the Field as quickly as possible, and any delay in returning a Scoring Object should not be considered Match Affecting or cause for a replay.
- A Scoring Object that comes to rest on top of the Field Perimeter is considered to have left the Field.
This rule has additional Violation notes. See Appendix C.
<SG5> Each Robot gets one Pin as a Preload. Red Alliance Preloads are red/yellow Pins ; blue Alliance Preloads are blue/yellow Pins. Prior to the start of each Match, each Preload must be placed such that it meets all of the following criteria:
- Contacting one Robot of the same Alliance color as the Preload.
- Not contacting the same Preload as another Robot.
- Not contacting other Scoring Objects.
- Not contacting any other Goals, Loaders, Load Zones, or Toggles.
Note: If a Robot is not present for their Match, then that Robot’s Preload may be used as a Match Load in accordance with <SG11>.
This rule has additional Violation notes. See Appendix C.
<SG6> Possession is limited to a maximum of one Pin and one Cup. Robots may not have Possession of more than one (1) Pin at once. Robots may not have Possession of more than (1) Cup at once. Robots in Violation of this rule must immediately stop all actions except for attempting to remove the excess Scoring Objects.
If they are unable to remove the excess Scoring Objects, then they must return to a legal starting position (as described by <SG1> ). They will not be eligible to receive points for ending the Match in the Midfield, and cannot interact with Toggles, Goals, or other Scoring Objects while in Possession of excess Scoring Objects.
- Plowing multiple Scoring Objects is permitted. Teams which employ Plowing strategies are encouraged to clearly demonstrate that none of the Scoring Objects are being Possessed, e.g., by using a flat face of the Robot with no active mechanisms.
<SG7> Don’t cross the Autonomous Line, and don’t interfere with your opponents’ actions. During the Autonomous Period, Robots may not contact foam tiles, Scoring Objects, or Field Elements which are on the opposing Alliance’s side of the Autonomous Line.
- The Autonomous Period should be primarily Offensive, with Teams focusing on scoring and executing strategic maneuvers rather than Defensive disruption. Teams should avoid actions that are primarily Defensive in nature, including but not limited to:
- Intentionally disrupting Scoring Objects or Field Elements on the opponent’s side of the Autonomous Line.
- Deliberately contacting an opponent’s Robot to interfere with their autonomous path.
- Scoring Objects that begin the Match in contact with the Autonomous Line are not considered to be on either side, and may be utilized by either Alliance during the Autonomous Period. For the purpose of this rule, all 20 Scoring Objects that begin the Match on or at the Autonomous Line are considered to be in contact with the Autonomous Line. See Figure SG-7.
- While incidental contact or unintentional interactions may occur with Robots on the other side of the Autonomous Line, Teams that employ deliberate Defensive autonomous strategies that impact their opponents’ autonomous routines may be subject to Minor or Major Violations at the discretion of the Head Referee.
- Teams cannot intentionally place Scoring Objects on the opponent’s side of the Autonomous Line.
- Contact with either of the following during the Autonomous Period will result in the Autonomous Bonus and an Autonomous Win Point being awarded to the opposing Alliance, unless the opposing Alliance also breaks rules in the Autonomous Period :
- An opponent Robot that isn’t interacting with the Autonomous Line, objects that begin the Match positioned above or in contact with the Autonomous Line, or the Midfield (see <SG8> ).
- Scoring Objects on the other side of the Autonomous Line.
This rule has additional Violation notes. See Appendix C.
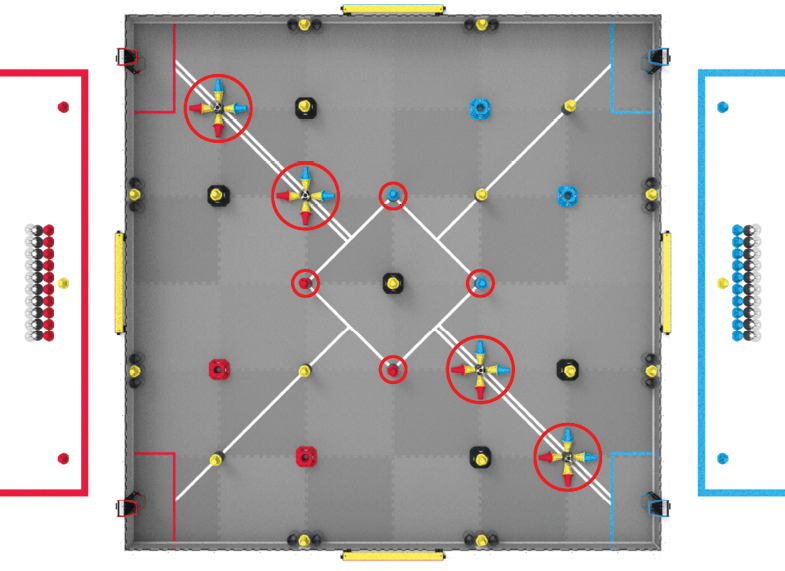
Figure SG-7: These Scoring Objects (circled in red) would be considered to be on the Autonomous Line.
<SG8> Engage with the Midfield and/or Autonomous Line during the Autonomous Period at your own risk. Any Robot that engages with the Midfield and/or Scoring Objects that begin the Match on the Autonomous Line should be aware that opponent Robots may also choose to do the same. Per <GG12> and <GG13>, Teams are responsible for the actions of their Robots at all times.
- For the purposes of this rule, “engages with” means any combination of:
- Contacting foam tiles within the Midfield
- Contacting the Goal in the Midfield
- Contacting Scoring Objects that begin the Match on the Autonomous Line
- If opposing Robots contact one another while both engaging with the Midfield or the Autonomous Line, and a possible <GG14> Violation occurs (e.g., damage, Entanglement, or tipping over), a judgment call will be made by the Head Referee within the context of <GG14> and <GG15> (just as it would if the interaction had occurred during the Driver Controlled Period ).
- If opposing Robots contact one another while both engaging with the Midfield or Autonomous Line, and an incidental Violation of <SG4> occurs, no penalty will be assessed on either Alliance.
- Intentional, strategic, repeated, or egregious offenses, such as negatively impacting Robots that are not engaging with the Midfield or the Autonomous Line, may still be deemed a Violation of <GG13>, <GG14>, <GG15>, <SG7>, <G1>, and/or <S1> at the Head Referee’s discretion.
The Midfield and the Scoring Objects that begin on the Autonomous Line are intended to be utilized by both Alliances during the Autonomous Period. This will inevitably result in Robot -on-Robot interactions, both incidental and intentional. The overarching intent of <SG8> is for the vast majority of these interactions to result in no rule Violations and / or penalties for either Alliance, just as no rules Violations occur in 99% of Driver Controlled interactions.
Teams are responsible for the actions of their Robots at all times. A Robot with a small wheel base, which tips over every time they enter the Midfield and contacts an opponent, should not attempt to claim a <GG14> Violation on their opponent.
With that being said, the Midfield is a neutral zone, not a “free-for-all” zone. The intent of clause D is to provide Head Referees with the leeway to still make a judgment call, if needed, when a Team has chosen to exploit this rule beyond its intent. Reckless or unsafe strategies aimed solely at the destruction, damage, tipping over, Entanglement, Trapping, or forcing of an opponent into a penalty are still prohibited in the VEX Robotics Competition.
<SG9> Alliance Goals are protected. Robots may not directly or indirectly interact with opposing Alliance-colored Goals. Examples of interactions include, but are not limited to:
- Making contact with the Goal
- Making contact with Scoring Objects stacked on the Goal
- Adding or removing Scoring Objects (Placed or otherwise)
- Strategically covering the Goal in a manner that prevents additional Scoring Objects from being Placed
This rule has additional Violation notes. See Appendix C.
<SG10> Placed Scoring Objects cannot be removed from neutral Goals.
This rule has additional Violation notes. See Appendix C.
<SG11> Match Loads may be introduced during the Match under certain conditions. For the purpose of this rule, “introduce” refers to the moment when a Drive Team Member has released a Scoring Object into a Loader.
During this action, a Drive Team Member’s hands may temporarily break the plane of the Field Perimeter. This momentary interaction is an exception to rule <GG4>. Excessive, unnecessary, or unsafe actions while introducing a Match Load may be considered a Violation of <S1> and/or <G1> at the Head Referee’s discretion.
Drive Team Members may introduce Match Load Scoring Objects by placing a single Pin, a single Cup, or a nested Cup and Pin into either of their Alliance-colored Loaders. Scoring Objects can be introduced through the top of the Loader when the Loader is not lifted, or through the back of the Loader when the Loader is raised by a Drive Team Member.
- Scoring Objects may only be introduced into Loaders during the Driver Controlled Period of the Match.
- A Match Load Scoring Object may not be contacted by a Robot prior to being introduced into a Loader.
- Match Load Scoring Objects may only be removed through the bottom opening of the Loader, by a Robot whose Alliance color matches the Loader.
This rule is applied differently for VEX U. See Rule <VUG4>.
This rule has additional Violation notes. See Appendix C.
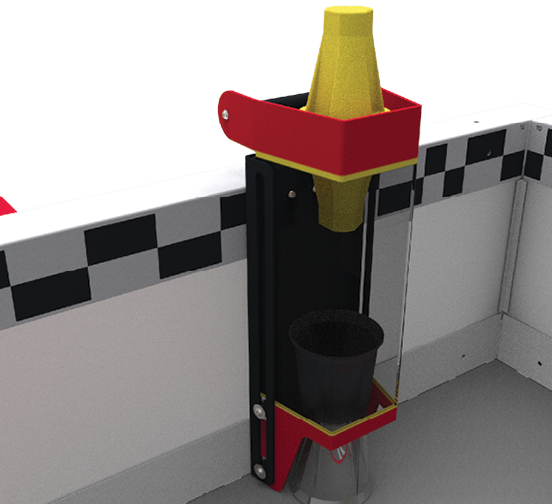
Figure SG11-1: Scoring Objects can be introduced through the top opening of the Loader.
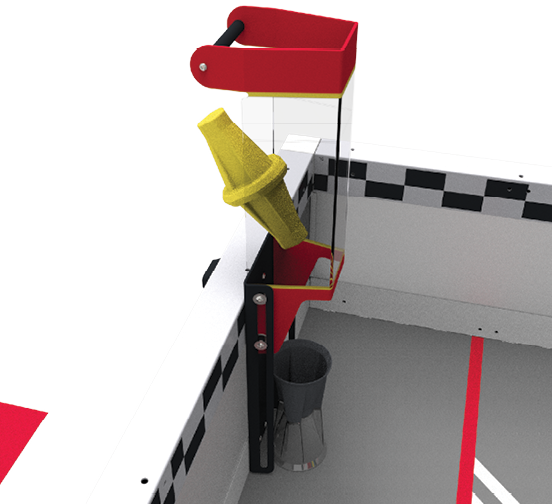
Figure SG11-2: Scoring Objects may also be introduced through the back of the Loader while it is raised.
<SG12> Some rules change during the Endgame period.
- Robots that are partially or entirely within the infinite 3D vertical projection of the Midfield must make an effort to limit vertical expansion to the approximate starting height of the Robot. If a Head Referee sees a Robot within the Midfield that is clearly expanded past its approximate starting height, that Robot should receive a verbal warning and must either return to approximate starting height or exit the Midfield.
- A Robot should receive a Violation if it takes no action to either return to approximate starting height or exit the Midfield after a brief period of time. The length of this period of time is subject to Head Referee judgement within the context of the Match and the warned Robot’s actions (or lack thereof).
- Robots that attempt to end the Match in the Midfield should expect vigorous interactions from opposing Robots. When a Robot is contacting or engaging with the Midfield, or is in proximity to the Midfield, incidental damage that is caused by opposing Robots pushing, tipping, or becoming Entangled with them would not be considered a Violation of <GG14>. Intentional damage or dangerous mechanisms may still be considered a Violation of <S1> or <G1> at the Head Referee’s discretion.
The intent behind the Endgame vertical expansion limit is to reduce the likelihood of tipped Robots due to expected Endgame interactions. Vigorous interactions involving taller Robots are much more likely to result in tipping compared to those involving shorter Robots.
Enforcement of this rule should focus on vertically expanded Robot lifts, rather than small pop-up mechanisms that are typically set to expand at the start of the Match.
<SG13> Load Zones are protected during the Driver Controlled Period of the Match.
- A Robot is protected while it is at least partially within one of its Alliance Load Zones. Robots may not directly or indirectly contact a protected opposing Alliance Robot.
- Robots may only enter an opposing Alliance Load Zone momentarily (e.g., while passing through or to retrieve a Scoring Object); Robots may not remain within an opposing Alliance Load Zone.
- Robots may not cause Scoring Objects to accumulate within an opposing Alliance Load Zone.
The intent of this rule is to protect Load Zones from intentional interference by the opposing Alliance (i.e., obstructing the Load Zone in an effort to inhibit Loader access).
This rule does not apply during the Autonomous Period.
This rule is applied differently for VEXU. See Rule <VUG7>.
Safety Rules
<S1> Be safe out there. If at any time the Robot operation or Team actions are deemed unsafe or have damaged a Field Element, Scoring Object, or the Field, the offending Team may receive a Disablement and/or Disqualification at the discretion of the Head Referee. The Robot will require re-inspection as described in rule <R2> before it may take the Field again.
<S2> Students must be accompanied by an Adult. Every Student at a VEX Robotics Competition event must be supervised by a responsible Adult. The Adult must obey all rules and be careful to not violate Student-centered policies, but must be present for the full duration of the event in the case of an emergency. Violations of this rule may result in removal from the event and additional penalties.
<S3> Each Student Team member must have a completed participant release form on file for the event and season. A Student Team member cannot participate in an event without a completed release form on file.
<S4> Stay inside the Field. If a Robot is completely outside of the Field during a Match, it will receive a Disablement for the remainder of the Match.
Note: The intent of this rule is not to penalize Robots for having mechanisms that inadvertently cross the Field Perimeter during normal game play.
<S5> Wear safety glasses. Drive Team Members must wear eye protection. All Drive Team Members must wear some form of eye protection while at the Field for Matches. Safety glasses or other eye wear with side shields and non-shattering lenses are recommended. While in the pit and queuing areas, it is highly recommended that all Team members wear eye protection.
General Rules
<G1> Treat everyone with respect. All Teams and other attendees are expected to conduct themselves in a respectful and professional manner while participating in or attending VEX V5 Robotics Competition events. If a Team or any of its members (Students or anyone else associated with the Team or its members) are disrespectful or uncivil to event staff, volunteers, or fellow competitors, they may be Disqualified from a current or upcoming Match. Team conduct pertaining to <G1> may also impact a Team’s eligibility for judged awards. Repeated or extreme Violations of <G1> could result in a Team being Disqualified from an entire event, depending on the severity of the situation.
- Event attendees are not allowed to record audio or video of Teams’ discussions with Head Referees or other event staff/volunteers.
This rule has additional Violation notes. See Appendix C.
<G2> V5RC is a Student-centered program. Adults should not make decisions about the Team’s /Robot’s build, design, coding, documentation, or gameplay, and should not provide an unfair advantage by providing ‘help’ that is beyond the Students’ independent abilities. Students must be prepared to demonstrate an active understanding of their design, Robot construction, programming, notebook, and strategies to judges or event staff. Students should build, design, and code the Robot with minimal Adult involvement. If a Team has an engineering notebook, the format, layout, and contents should be created and maintained by Students with minimal Adult involvement; Adults should not transcribe or type notebook entries or code for Students.
Some amount of Adult mentorship, teaching, and/or guidance is an expected and encouraged facet of VEX competitions. No one is born an expert in robotics! However, obstacles should always be viewed as teaching opportunities, not problems for an Adult to solve for the Team.
This rule has additional Violation notes. See Appendix C.
<G3> Use common sense. When reading and applying the various rules in this document, please remember that common sense always applies in the VEX V5 Robotics Competition.
<G4> All work must represent the skill level of the Students on the Team. All work must represent the skill level of the Students currently on the Team. Teachers, coaches, mentors, and peers can teach concepts, skills, and processes; demonstrate techniques; ask guiding questions; review/critique the Team’s work; and otherwise advise Team members. All final solutions used in competition (including the Team’s design, Robot, code, strategies, documentation, and ongoing work) must be the work of the Student Team members. Organizations should develop a plan that encourages and empowers Students to make their own decisions (see <G2> ).
- Designs and code provided by VEX Robotics:
- Teams may use Robot plans and code (e.g., Hero Bots, VEXcode configurations, etc.) provided by VEX Robotics, but are encouraged to use these Robots, mechanisms, and code only as a starting point that Students modify, improve, or replace as their skills increase.
- Plans provided by VEX Robotics are the only legal plans available for use in competition.
- Robot design and construction:
- Teams must avoid academic dishonesty and should not directly copy a Robot or mechanism other than those included in clause A. This includes, but is not limited to, the use of instructions, pictures, videos, notebooks, CAD designs, and/or any other documentation useful to the design process.
- Teams may be inspired by designs created by other Teams, and can use an idea from someone else to spark innovation, but are expected to clearly document and give credit to all ideas that are used for inspiration. The Team must describe how they made meaningful changes to the original idea to arrive at a design that is uniquely their own. It should be clear that this final implementation is not an exact copy of ANY other original design.
- Teams should demonstrate their design process in their engineering notebook, and provide it if asked to do so by event staff. Failure to demonstrate evidence of iteration, innovation, and/or modification will result in a Violation.
- Teams may only use custom parts (e.g., cut/shaped non-shattering plastic, or heavily modified legal VEX components) that were designed and created by the Students on that Team.
- Robot code:
- Teams may use publicly available example code and/or custom libraries from outside sources. However, Student Team members must understand the resulting code, be able to explain all facets of their competition code, and be capable of independently creating code on a level equivalent to the code used on their Robot if asked to do so.
- Teams may not use Large Language Models, or similar forms of artificial intelligence (AI), to create or improve the code used in competition, as the resulting code does not reflect the skill level of the Students on the Team.
- Engineering notebook:
- The Team’s engineering notebook must be the work of the Students on the Team, and cannot be edited, formatted, or revised by anyone other than the Students on the Team.
- Teams may not use Large Language Models, or similar forms of AI, to create or improve the content of their engineering notebook.
- Teams can be inspired by engineering notebooks and formats from other Teams and/or seasons, but must ensure that all content is original and created by the members of the Team.
- Collaboration with other Teams :
- Teams can collaborate on game analysis, brainstorming, strategy, and other steps of the engineering design process, but the final solutions used/presented at competitions must be the independent work of the Students on each Team.
- Robots, code, and/or engineering notebooks that are identical or substantially similar to one another across Teams, whether they’re within the same school/organization/club or from separate organizations, are in Violation of this rule, regardless of whether they compete in the same or different events. Every Team is expected to put in the time, effort, and resources needed to undergo an independent design process and develop their own Robots and code.
This rule has additional Violation notes. See Appendix C.
<G5> Each Student can only belong to one Team. Each Team must include Drive Team Members, Coder (s), Designer (s), and Builder (s). Many also include Strategists and Notebooker (s). No Student may fulfill any of these roles for more than one VEX V5 Robotics Competition Team in a given competition season. Students may have more than one role on the Team (e.g., the Designer may also be the Builder, the Coder, and a Drive Team Member ).
- Team members may only move from one Team to another for non-strategic reasons outside of the Team’s control.
- Examples of permissible moves may include, but are not limited to, changing schools, conflicts within a Team, or combining/splitting Teams.
- Examples of strategic moves in Violation of this rule may include, but are not limited to, one Coder “switching” Teams in order to program multiple Robots, one Student designing multiple Teams’ Robots, or one Student writing the engineering notebook for multiple Teams.
- If a Student leaves a Team to join another Team, <G4> still applies to the Students remaining on the previous Team. For example, if a Coder leaves a Team, then that Team’s Robot must still represent the skill level of the Team without that Coder. One way to accomplish this would be to ensure that the Coder teaches or trains a “replacement” Coder in their absence.
- Points ii and iii are intended to represent real-world situations that are found in industry engineering. If a vital member of a professional engineering team were to suddenly leave, the remaining members of the team should still be capable of working on / maintaining their project.
- When a Team qualifies for a Championship event (e.g., States, Nationals, Worlds, etc.) the Students on the Team attending the Championship event are expected to be the same Students on the Team that was awarded the spot. Students can be added as support to the Team, but may not be added as Builders, Drive Team Members, Coders, or Notebookers for the Team.
- An exception is allowed if only one (1) member of the Team is able to attend the event. The Team can make a single substitution of a Drive Team Member or Coder for the Championship event with another Student, even if that Student has competed on a different Team. This Student will now be a member of this new Team and may not substitute back to the original Team during the season.
Note: Teams cannot “borrow” Students from other Teams to serve as Drive Team Members, Coders, Designers, Builders, or Notebookers. However, Teams can add permanent members throughout the season under the guidelines of this rule.
<G6> There is a difference between accidentally and willfully violating a Robot rule. Any Violation of Robot rules, accidental or intentional, will result in a Team being unable to play until they pass inspection (per <R2d>).
However, Teams who intentionally and/or knowingly circumvent or violate rules to gain an advantage over their fellow competitors are in Violation of the spirit and ethos of the competition.
This rule has additional Violation notes. See Appendix C.
General Game Rules
<GG1> Only Drive Team Members, and only in the Alliance Station. During a Match, Robots may be operated only by that Team’s Drive Team Members and/or by software running on the Robot’s control system in accordance with <R9> and <GG11>. A Team may send up to (3) Drive Team Members to their Alliance Station for each Robot, and those Drive Team Members must remain in their Alliance Station for the duration of the Match.
Drive Team Members are the only Team members that are allowed to be in the Alliance Station during a Match. Adults (other than event staff) are not permitted to be in the Alliance Station during a Match.
- Drive Team Members are prohibited from any of the following actions during a Match :
- Using any sort of communication device in the Alliance Station. Non-headphone devices with communication features turned off (e.g., a phone in airplane mode, a walkie talkie turned off, smart glasses with communication features disabled) are allowed. Communication features can be enabled for translation apps during post-Match discussions.
- Standing or sitting on any sort of object during a Match, regardless of whether the Field is on the floor or elevated, except as required by an officially approved accommodation request.
- Bringing/using additional materials to simplify the game challenge during a Match (e.g., device to align or add Scoring Objects to a Loader.
- To ensure that Drive Team Members are aware of verbal calls during a Match (as an application of rules <T1>, <G1>, <S1>, and <G3> ), powered headphones, earbuds, passive earpieces connected to electronic devices, or other personal accessories/devices that transmit audio cannot be worn/used in the Alliance Station except as required by an officially approved accommodation request.
- Individuals who are not Drive Team Members for a Match cannot provide directions, commands, or advice to the Drive Team Members during that Match. They’re welcome to provide cheerful, positive encouragement, but should not affect Match play or strategy.
This rule has additional Violation notes. See Appendix C.
<GG2> A Team’s Robot should attend every Match. The Team’s Robot must be in the Alliance Station or on the Field for the Team’s assigned Match, even if the Robot is not functional. If the Robot is not at the Field for the entire duration of the Match, the Team will be considered a “no-show” and receive zero (0) Win Points, Autonomous Win Points, Autonomous Points, and Strength of Schedule Points.
- Teams are expected to participate in all scheduled Qualification Matches, Alliance Selection, and Elimination Matches (if they’re an Alliance Captain or were selected to join an Alliance for Elimination Matches ). Failure to attend scheduled Matches or Alliance Selection may be considered a Violation of <G1>. Teams that participate in zero Qualification Matches cannot be considered for judged awards.
<GG3> Robots on the Field must be ready to play. When a Team puts their Robot on the Field, it must be prepared to play (e.g., battery charged, sized within the starting size constraint, includes only the correct Alliance -color license plates, etc.).
- Robots must be placed on the Field promptly. Repeated failure to do so could result in a Violation of <G1> and/or removal of the Robot from the current Match at the Head Referee’s discretion.
- If a Robot is delaying the scheduled start of a Match, it may be removed from the Field at the discretion of the Head Referee and Event Partner. The Robot may remain at the Field so that the Team does not get assessed a “no-show” (per <GG2> ).
- If a Robot is not placed on the Field prior to the start of a Match, it cannot be placed on the Field during that Match.
- Teams who use VEX pneumatics must have their systems charged before they place the Robot on the Field.
- If an event is using Smart Field Control and a Robot is unable to successfully connect to Smart Field Control prior to the scheduled start of a Match, the Head Referee may ask the Team to remove their Robot from the Field in accordance with clause B.
<GG4> Hands out of the Field. During a Match, Drive Team Members are prohibited from making intentional contact with any Field Element, Robot, or Scoring Object that has been introduced to the Field, except for the contact specified in <GG4a> or while introducing Match Loads as described in rule <SG11>.
- Drive Team Members are not permitted to reach into the 3-dimensional volume of the Field Perimeter at any time during the Match, apart from the actions described above. Rule <S1> applies.
- Any concerns regarding Field Element or Scoring Object starting positions should be raised with the Head Referee prior to the Match. Team members may never adjust Scoring Objects or Field Elements themselves.
- Transitive contact, such as contact with the Field Perimeter that causes the Field Perimeter to contact Field Elements or objects inside of the Field, could be considered a Violation of this rule.
- During the Driver Controlled Period, Drive Team Members may only touch their own Robot if the Robot has not moved at all during the Match. Movement caused by an external force, such as another Robot, should not prevent a Drive Team Member from interacting with their Robot under this rule. Touching the Robot in this case is permitted only for the following reasons:
- Turning the Robot on or off.
- Plugging in a battery.
- Plugging in a V5 Robot Radio.
- Touching the V5 Robot Brain screen, such as to start a program.
<GG5> Match replays are allowed, but rare. Match replays (i.e., playing a Match over again from its start) must be agreed upon by both the Event Partner and Head Referee, and will only be issued in the most extreme circumstances. Some example situations that may warrant a Match replay are as follows (note that this is not an exhaustive list):
- Match Affecting “Field fault” issues.
- One or more Field Elements and/or Scoring Objects starting in incorrect positions, and out of the allowed tolerances (see <T5> ).
- Tape lines lifting.
- Field Elements detaching or moving beyond normal tolerances (not as a result of Robot interactions).
- The Autonomous Period or Driver Controlled Period ending early.
- Field control disconnecting or Disabling multiple Robots. Note, this is sometimes confused with a Robot whose motors have overheated, or bent pins on a controller’s competition port causing intermittent drop-outs. In general, any true Field fault will impact both Alliances simultaneously, not one Robot at a time.
- Match Affecting game rule issues.
- Head Referee Disables a Robot for a misinterpretation of a rule Violation.
- Head Referee starts the Driver Controlled Period of the Match without determining the outcome of the Autonomous Period winner.
- The Field is reset before a score is determined.
- A Match is run before its scheduled time without a Team.
<GG6> Disqualifications. When a Team receives a Disqualification in a Qualification Match, they receive a score of zero (0) for the Match, as well as zero (0) Win Points, Autonomous Win Points, Autonomous Points, and Strength of Schedule Points.
- If the Team receiving the Disqualification is on the winning Alliance, then Teams on the opposing Alliance who are not also Disqualified will receive the win for the Match and two (2) Win Points.
- The Team’s non-Disqualified Alliance Partner is unaffected, i.e., they will also receive the win for the Match and two (2) Win Points.
- If the Match was a tie, then each Team on the opposing Alliance (the Alliance that did not receive the Disqualification ) will receive the win for the Match and two (2) Win Points. If both Alliances have a Team receiving a Disqualification, then all non-Disqualified Teams will receive a tie for the Match and one (1) Win Point.
- Autonomous Win Points are not given to Teams that receive a Disqualification, and are not automatically awarded to the opposing Alliance.
When a Team is Disqualified in an Elimination Match, the entire Alliance is Disqualified ; they receive a loss for the Match, and the opposing Alliance is awarded the win. If both Alliances receive a Disqualification in an Elimination Match, both Alliances receive a loss and will play another Match to determine a winner.
Note: If a Team is Disqualified in a Robot Skills Match, a score of zero (0) will be recorded for that Match.
<GG7> Time-outs. Each Elimination Alliance gets one three-minute Time-out, which they may request during the Elimination Bracket. The Time-out will be served at the time of the Alliance’s next upcoming Match. Alliances must request their Time-out between Elimination Matches ; they may not use their Time-out during a Match, for another Alliance’s Match, or after they have been eliminated. There are no Time-outs during the Qualification Match schedule.
- A Time-out can be ended early, but only if agreed to by both Alliances and the Head Referee.
- An Alliance’s Time-out request should never be denied if the Alliance legitimately needs extra time.
<GG8> Keep your Robots together. Robots may not intentionally detach parts during the Match or leave mechanisms on the Field.
Note: Parts which become detached unintentionally are a Minor Violation, are no longer considered “part of a Robot,” and should be ignored for the purpose of any rules which involve Robot contact or location (e.g., scoring) or Robot size.
This rule has additional Violation notes. See Appendix C.
<GG9> Don’t hook your Robot to the Field, and don’t get Entangled. Robots may not intentionally grasp, grapple, hook, attach to or otherwise Entangled with any Field Elements. Strategies with mechanisms that react against multiple sides of a Field Element in an effort to latch or hook onto said Field Element are prohibited. The intent of this rule is to prevent Teams from unintentionally damaging the Field and/or from anchoring to or otherwise Entangling themselves with the Field.
Whenever possible, Head Referees should alert Teams to potential Violations before they happen to prevent actual Violations. If a Robot takes immediate action to avoid or resolve the issue, and if the Head Referee determines that the issue had no effect on the Match, no Violation should be recorded.
<GG10> The red Alliance may choose to place last. The red Alliance has the right to place its Robots on the Field last in Qualification Matches and Elimination Matches. Once a Team has placed its Robot on the Field, in order to avoid schedule delays its position should not be adjusted prior to the Match. <GG3> applies. If a Team chooses to reposition their Robot after it has already been placed, the opposing Alliance will also be given the opportunity to reposition their Robots promptly.
This rule is applied differently for VEX U. See Rule <VUG2>
<GG11> Controllers must stay connected to the Field. Prior to the beginning of each Match, Drive Team Members must plug their V5 Controller into the Field’s control system. This cable must remain plugged in for the duration of the Match, and may not be removed until the “all-clear” has been given for Drive Team Members to retrieve their Robots. See <T8> for more information regarding Field control system options.
This rule has additional Violation notes. See Appendix C.
<GG12> Autonomous means “no humans.” During the Autonomous Period, Drive Team Members are not permitted to interact with the Robots in any way, directly or indirectly. This could include, but is not limited to:
- Activating any controls on their V5 Controllers
- Unplugging or otherwise manually interfering with the Field connection in any way
- Manually triggering sensors (including the Vision Sensor) in any way, even without touching them
Note: In extreme cases, with permission from the Head Referee, Teams may Disable their Robot during the Autonomous Period by holding the power button on their V5 Controller. This exception is only intended for egregious safety- or damage-related circumstances; Disabling an autonomous routine for strategic purposes would still be considered a Violation of <GG12>.
This rule has additional Violation notes. See Appendix C.
<GG13> All rules still apply in the Autonomous Period. Teams are responsible for the actions of their Robots at all times, including during the Autonomous Period. Any Violations, Major or Minor, committed during the Autonomous Period will result in the Autonomous Bonus being automatically awarded to the opposing Alliance and make the violating Team’s Alliance ineligible for the Autonomous Win Point.
If both Alliances commit Violations during the Autonomous Period, then no Autonomous Bonus will be awarded.
This rule has additional Violation notes. See Appendix C.
<GG14> Don’t destroy other Robots. But, be prepared to encounter defense. Strategies aimed solely at the destruction, damage, tipping over, or Entanglement of opposing Robots are not part of the ethos of the VEX V5 Robotics Competition and are not allowed.
- V5RC Override is intended to be an Offensive game. Teams that partake in solely Defensive or destructive strategies will not have the protections implied by this rule (see <GG15> ). However, Defensive play which does not involve destructive or illegal strategies is still within the spirit of this rule.
- V5RC Override is also intended to be an interactive game. Some incidental tipping, Entanglement, and damage may occur as a part of normal gameplay without Violation. It will be up to the Head Referee’s discretion whether the interaction was incidental or intentional.
- A Team is responsible for the actions of its Robot at all times, including the Autonomous Period. This applies both to Teams that are driving recklessly or potentially causing damage, and to Teams whose Robots have small and/or unstable wheel bases. A Team should design its Robot such that it is not easily tipped over or damaged by minor contact.
- <GG14> may be applied differently in the Midfield during the Endgame. See <SG12>.
This rule has additional Violation notes. See Appendix C.
<GG15> Offensive Robots get the “benefit of the doubt” when judgment calls are required. In a case where a Head Referee is forced to make a judgment call regarding a destructive interaction between a Defensive and Offensive Robot, or an interaction which results in a questionable Violation, referees will decide in favor of the Offensive Robot. This also applies during the Autonomous Period (see <SG7a>).
<GG16> You can’t force an opponent into a penalty. Intentional strategies that cause an opponent to break a rule are not permitted, and will not result in a Violation for the opposing Alliance.
This rule has additional Violation notes. See Appendix C.
<GG17> No Holding for more than a 3-count. A Robot may not Hold an opposing Robot for more than a 3-count during the Driver Controlled Period.
For the purposes of this rule, a “count” is defined as an interval of time that is approximately one second in duration, and “counted out” by Head Referees verbally. A Holding count should begin immediately once the Head Referee observes a suspected Holding interaction.
The Holding count should pause when at least one of the following conditions is met:
- The two Robots are separated by at least two (2) feet (approximately one foam tile).
- Either Robot has moved at least two (2) feet away (approximately one tile) from the location where the Trapping or Pinning count began.
- In the case of Lifting, this location is measured from where the Lifted Robot is released, not from where the Lifting began.
- The Holding Robot becomes Trapped or Pinned by a different Robot.
- In this case, the original count would end, and a new count would begin for the newly Trapped or Pinned Robot.
- In the case of Trapping, if an avenue of escape becomes available due to changing circumstances in the Match.
After a Holding count ends, a Robot may not resume Holding the same Robot again for a 5-count. If a Team resumes Holding the same Robot within that 5-count, the original Holding count will resume from where it ended. A Head Referee should use fingers to display the 5-count that occurs after the end of a Holding count, and “wave it off” after the Holding interaction has been cleared.
If two Robots are working together to Trap an opponent simultaneously, the Holding count can be applied to both Robots ; it’s possible for them to legally take turns Trapping, but it’s risky.
This rule has additional Violation notes. See Appendix C.
<GG18> Use Scoring Objects to play the game. Scoring Objects may not be used to accomplish actions that would be otherwise illegal if they were attempted by Robot mechanisms. If a rule is Violated through the use of a Scoring Objects instead of a Robot mechanism, it should be evaluated as though the rule in question had been Violated by a Robot mechanism. Examples include, but are not limited to:
- Interfering with an opponent’s Autonomous routine per <SG7>
- Using a Scoring Objects to intentionally tip or Entangle an opponent Robot
The intent of this rule is to prohibit Teams from using Scoring Objects as “gloves” to loophole any rule that states “a Robot may not [do some action].” This rule is not intended to be taken in its most extreme literal interpretation, where any interaction between a Scoring Object and a Robot needs to be scrutinized with the same intensity as if it were a Robot.
Section 3 - Robot Skills
Overview
In Robot Skills Matches, Teams have one minute to score as many points as possible. There are two types of Robot Skills Matches : Driving Skills Matches, which are entirely Driver controlled, and Autonomous Coding Skills Matches, which are autonomous with limited human interaction. Teams are ranked based on their combined score in the two types of Robot Skills Matches.
Robot Skills Matches are optional for all Teams. Teams who do not compete in Robot Skills Matches will not be penalized in Teamwork Matches. However, participation in Robot Skills Matches may impact eligibility for judged awards at the event.
At events that include Teamwork Matches, Teams may only participate in Robot Skills Matches if they also participate in the Qualification Matches. See rule <T20>.
Robot Skills Challenge Rules
<RSC1> Standard rules apply in most cases. All rules from previous sections apply to Robot Skills Matches, unless otherwise specified in this section.
- Removing Scoring Objects from the Field in a Robot Skills Match is not a Violation. Scoring Objects that leave the Field cannot be returned.
- In the Robot Skills Challenge, the standard definition of Match Affecting does not apply, because there is no winner or loser. When evaluating whether a rule Violation should be classified as a Major Violation or Minor Violation in the context of this criteria, the term “score affecting” can be substituted for “Match Affecting.” A Violation is considered “score affecting” if it results in a net increase of that Team’s score at the end of the Match.
- Violations of <GG>, <SG>, and <RSC> rules that occur during a Robot Skills Match should only affect the outcome of that Match and should not be considered when determining whether a Violation has been repeated during the event.
<RSC2> Match play is different in Robot Skills Matches.
- The Robot must start the Robot Skills Match in a legal starting position in the Quadrant adjacent to the red Alliance Station.
- All Drive Team Members must remain in the red Alliance Station for the duration of the Match.
- One red/yellow Pin must be used as a Preload in accordance with <SG5>.
- Teams may only introduce Match Load Scoring Objects through red Alliance Loaders.
- Robots can add or remove Pins or Cups on all Goals.
- Robots may move freely about the Field after the start of the Match.
This rule is applied differently for VEX U. See Rule <VURS3>.
<RSC3> Scoring Robot Skills Matches. For each Robot Skills Match, Teams are awarded a score based on the following rules and scoring table:
- Teams can earn points for Pins of any color.
- Red Pins can only be Scored if they are Placed in a red Quadrant or in the Midfield.
- Blue Pins can only be Scored if they are Placed in a blue Quadrant or in the Midfield.
- Yellow Pins can only be Scored if they are Owned.
- Toggles only confer Ownership of Pins when the Toggle matches the color of its Quadrant (i.e., yellow Pins Placed in a red Quadrant with a Toggle that is set to blue are not Owned and will not earn any points).
- Yellow Pins Placed in the Midfield are Owned if a Robot ends the Match in the Midfield. (See <SC6>.)
- A Pin in contact with a Robot at the end of the Match does not score points.
- The Team will earn points for a Robot in the Midfield if the Robot meets the conditions of rule <SC6> at the end of the Match.
5 points |
|
10 points |
|
8 points |
<RSC4> Field setup for Skills Matches. The Field is set up differently than a Head-to-Head Match, with the following modifications:
- In Autonomous Coding Skills Matches, the VEX GPS code strip must be installed on the Field.
- Revised Match Loads. Three (3) red/yellow Pins, four (4) blue/yellow Pins, and seven (7) Cups begin off the Field as Match Loads.
- All Goals start the Match empty with no Placed Pins.
This rule is applied differently for VEX U. See Rule <VURS1>.
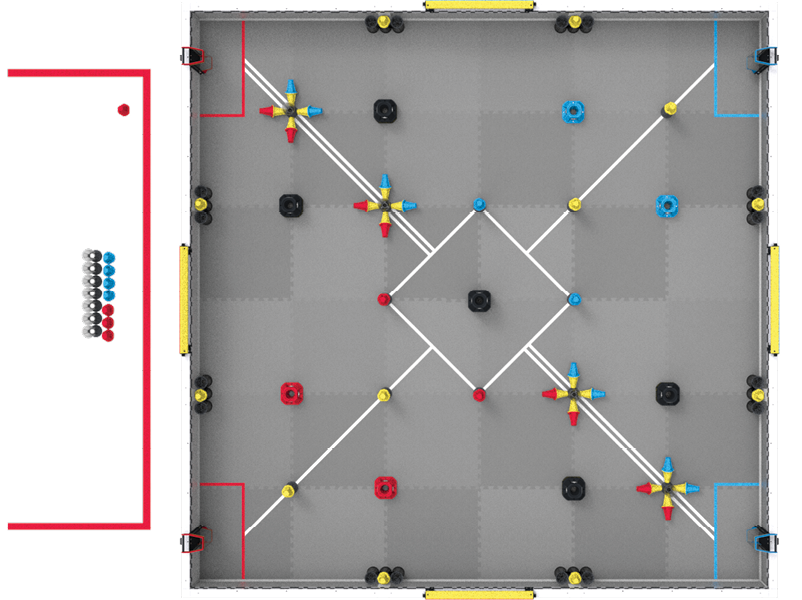
Figure RSC4-1: An overhead view of a V5RC Override Robot Skills Match.
<RSC5> Skills Stop Time. If a Team wishes to end their Robot Skills Match early, they may elect to record a Skills Stop Time. This is used as a tiebreaker for Robot Skills Challenge rankings. A Skills Stop Time does not affect a Team’s score for a given Robot Skills Match. Drive Team Members and field staff must agree prior to the Match on the signal that will be used to end the Match early.
- Teams who intend to attempt a Skills Stop Time must “opt-in” by verbally confirming with the Scorekeeper Referee prior to the Robot Skills Match. If no notification is given prior to the start of the Match, then the Team forfeits their option to record a Skills Stop Time for that Match and they will receive a default Skills Stop Time of 0.
- This conversation should include informing the Scorekeeper Referee which Drive Team Member will signal the stop. The Match may only be ended early by a Drive Team Member for that Match.
- If a Team runs multiple Robot Skills Matches in a row, they must reconfirm their Skills Stop Time choice with the Scorekeeper Referee prior to each Match.
- Any questions regarding a Skills Stop Time should be reviewed and settled immediately following the Match. <T1> and <T3> apply to Robot Skills Matches.
- If the event is utilizing a V5 Robot Brain or the TM Mobile app for Robot Skills Challenge field control, a Drive Team Member may elect to start and stop their own Robot Skills Matches.
- This V5 Robot Brain or other device running the TM Mobile app will be used to start the Robot Skills Matches (i.e., “enable” the Robot ), end the Robot Skills Match (i.e., “Disable ” the Robot ), and display the official Skills Stop Time to be recorded.
- This V5 Robot Brain must be running the official field control user program.
- For more information regarding the use of a V5 Robot Brain for Robot Skills Challenge field control, and to download the official field control user program, visit this VEX Knowledge Base article.
- For more information regarding the use of TM Mobile for field control, see the Tournament Manager documentation.
- At events which do not have a V5 Robot Brain or the TM Mobile App available for Robot Skills Challenge field control, Drive Team Members and field staff must agree prior to the Match on the signal that will be used to end the Match early. A manual timer must be used in conjunction with a VEXnet Competition Switch.
- The moment when the Match ends early is defined as the moment when the Robot is “Disabled ” by the field control system. The time shown on the timer should be rounded up to the nearest second. For example, if the Robot is Disabled and the timer shows 25.2 seconds, then the Skills Stop Time should be recorded as 26.
- The agreed-upon signal must be both verbal and visual, such as Drive Team Members crossing their arms in an “X” or placing their V5 Controller(s) on the ground.
- The signal must be given by a Drive Team Member who is standing in the Alliance Station.
- It is recommended that Drive Team Members also provide verbal notice that they are approaching their Skills Stop Time, such as by counting out “3-2-1-stop.”
- It is at the Event Partner’s discretion which method will be used to record Skills Stop Times at a given event. The chosen method must be communicated prior to the start of Matches (such as during an event meeting), and made equally available to all Teams.
- If an event intends to use a manual timekeeping method, a Team cannot bring their own V5 Robot Brain just for use during their own Robot Skills Match.
- If an event intends to utilize a V5 Robot Brain, all Teams must use the same V5 Robot Brain for all Robot Skills Matches on a given Field.
- If an event is using multiple Fields for Robot Skills Matches, the same method must be used at all Fields, as described in rule <T21>. Multiple V5 Robot Brains may be used as needed (e.g., a “Field 1 Brain” and a “Field 2 Brain”).
- The default timed “Drive” program accessed from a V5 Controller is intended for practice only, and cannot be used for an official Robot Skills Match.
- If a Team chooses to utilize/record a Skills Stop Time, the 5-second grace period described in rule <SC1> does not apply.
Section 4 - The Robot
Overview
All Robots must pass inspection before competing in the VEX V5 Robotics Competition to ensure compliance with all Robot rules. Inspections typically occur during Team check-in or practice time. Teams should use the rules below to pre-inspect their Robot and confirm it meets all requirements.
Most rules are hard limits (e.g., motor quantity), while others are subject to inspector discretion (e.g., safety concerns). At many events, the lead inspector and Head Referee are the same person; if not, inspectors should consult the Head Referee for judgment calls. Per <R2d> and <R2e>, the Head Referee has final authority on all Robot rules and whether a Robot may compete.
Inspection Rules
<R1> One Robot per Team. Each Team can only bring one Robot to a given event in the VEX V5 Robotics Competition. Though it is expected that Teams will make changes to their Robot at the competition, a Team is limited to only one Robot at a given event, and a given Robot may only be used by one Team. A VEX Robot, for the purposes of the VEX V5 Robotics Competition, has the following subsystems:
- Subsystem 1: Mobile robotic base including wheels, tracks, legs, or any other mechanism that allows the Robot to navigate the majority of the flat playing Field surface. For a stationary Robot, the robotic base without wheels would be considered Subsystem 1.
- Subsystem 2: Power and control system that includes a legal VEX battery, a legal VEX control system, and associated motors for the mobile robotic base.
- Subsystem 3: Additional mechanisms (and associated motors) that allow manipulation of Scoring Objects and interactions with Field Elements and other Robots.
Given the above definitions, a minimum Robot for use in any VEX V5 Robotics Competition event (including Robot Skills Matches ) must consist of subsystems 1 and 2 above. Thus, if you swap out an entire subsystem 1 or 2, you have created a second Robot and are in Violation this rule.
- Teams may not compete with one Robot while a second is being modified or assembled at a competition.
- Teams may not have an assembled second Robot on hand at a competition that is used to repair or swap parts with the first Robot.
- Teams may not switch back and forth between multiple Robots during a competition. This includes using different Robots for Robot Skills Matches, Qualification Matches, and/or Elimination Matches.
- Multiple Teams may not use the same Robot. Once a Robot has competed under a given Team number at an event, it is “their” Robot ; no other Team may EVER compete with it.
This rule is applied differently for VEX U. See Rule <VUR1>.
<R2> Robots must pass inspection. Every Robot will be required to pass a full inspection before being cleared to compete. This inspection will ensure that all Robot rules and regulations are met. Noncompliance with any Robot design or construction rule will result in removal from Matches or Disqualification of the Robot at an event until the Robot is brought back into compliance, as described in the following subclauses.
- Significant changes to a Robot, such as a partial or full swap of Subsystem 3, must be re-inspected before the Robot may compete again.
- All possible functional Robot configurations must be inspected before being used in competition. This especially pertains to modular or swappable mechanisms (per <R1> ) and Match starting configurations/sizes (per <R3> ).
- Teams may be requested to submit to spot inspections by Head Referees. Refusal to submit will result in Disqualification.
- Robots which have not passed inspection (i.e., that are in Violation of one or more Robot rules) will not be permitted to play in any Matches until they have passed inspection. <GG2> will apply to any Matches that occur until the Robot has passed inspection.
- If a Robot has passed inspection, but is later confirmed to be in Violation of a Robot rule during or immediately following a Match by a Head Referee, they will be Disqualified from that Match. This is the only Match that will be affected; any prior Matches that have already been completed will not be revisited. <R3d> will apply until the Violation is remedied and the Team is re-inspected.
- All inspection rules are to be enforced within the discretion of the Head Referee within a given event. Robot legality at one event does not automatically imply legality at future events. Robots which rely on “edge-case” interpretations of subjective rules, such as whether a decoration is “non-functional” or not, should expect additional scrutiny during inspection.
- Events may wish to use “inspection markers” (e.g., zip tie or sticker) to identify Robots that have passed inspection at that event. Inspection markers are functional components and are subject to all Robot rules, including legal materials and Robot size/expansion limits.
Event staff and volunteers are allowed to contact and/or photograph Robots during inspection and/or at other times as needed.
<R3> Robots must fit within an 18” x 18” x 18” volume.
- Compliance with this rule may be checked using the official VEX Robotics On-Field Robot Expansion Sizing Tool.
- Event Partners may construct and/or provide any sizing tool that measures the correct dimensions.
- Any restraints used to maintain starting size (i.e., zip ties, rubber bands, etc.) must remain attached to the Robot for the duration of the Match, per <GG8>.
- For the purposes of this rule, it can be assumed that Robots will be inspected and begin each Match on a flat standard foam field tile.
This rule is applied differently for VEX U. See Rule <VUR1>.
<R4> Officially registered Team numbers must be displayed on Robot license plates. To participate in an official VEX V5 Robotics Competition event, a Team must first register on events.vex.com and receive a V5RC Team number. This Team number must be displayed on the Robot using license plates. Teams may choose to use the official V5RC License Plate Kit, or may create their own using legal materials.
- License plates must be placed in fixed locations on exactly two (2) horizontally opposing sides of the Robot and must remain visible, legible, and attached for the entirety of the Match. The top of a Robot is not considered a “side” for these two license plates.
- License plates should be mounted in locations that remain stationary on the Robot during a Match (e.g., not on a rotating intake or flipping manipulator). The function of license plates is to identify Robots for referees, spectators, and other Teams. Identification is harder when a license plate on a Robot moves during a Match.
- License plates must be securely attached to the Robot using materials that are legal for Robot construction. VEX IQ pins are not legal for mounting license plates on Robots.
- Robots may only include license plates that match their Alliance color for the current Match (i.e., red Alliance Robots must have only red plates installed for the Match ).
- License plates are considered functional components, and must meet the requirements of all Robot rules.
- Additional license plates cannot be used on the Robot for any purpose.
- Team numbers must be in white font, and clearly legible. Number/letter stickers are legal for use on license plates instead of or in addition to those in the V5RC License Plate Kit.
- Custom license plates used to meet the requirements of <R4a> and <R4f> must be within the following size limits:
- Height: between 2.0 (50.8mm) and 2.5 inches (63.5mm)
- Width: between 4.0 (101.6mm) and 4.5 inches (114.3mm)
- Thickness: up to 0.25” (6.35mm)

Figure R4-1: An example of a license plate made from the V5RC License Plate Kit.
Figure R4-2: An example of a legal custom license plate
<R5> Let go of Scoring Objects after the Match. Robots must be designed to permit easy removal of Scoring Objects from any mechanism without requiring the Robot to have power after a Match.
<R6> Robots have one Brain. Robots must ONLY use one (1) VEX V5 Robot Brain (276-4810). Any other microcontrollers or processing devices are not allowed, even as non-functional decorations.
- This includes microcontrollers that are part of other VEX product lines, such as VEX Cortex, VEX EXP, VEXpro, VEX CTE, VEX RCR, VEX IQ, VEX GO, VEX AIR, or VEX Robotics by HEXBUG. This also includes devices that are unrelated to VEX, such as Raspberry Pi or Arduino devices.
- V5 Robot Brain accessories (short flanges, long flanges, and the magnetic screen protector) are part of the V5 Robot Brain and are only legal for use on Robots as part of the V5 Robot Brain.
- At events using a V5 Smart Field Control System, the “Team Number” field in the Robot Brain must be set as the Team’s registered number and letter (with no spaces).
This rule is applied differently for VEX U. See Rules <VUR10> and <VUR12>.
<R7> Keep the power button or battery connection accessible. The on/off button on the V5 Robot Brain and/or the Battery Cable connection on either the V5 Robot Brain or V5 Robot Battery must be accessible without moving or lifting the Robot. The V5 Brain screen should be easily visible during Robot inspection. Keeping the V5 Brain screen visible throughout a Match is recommended but not required.
<R8> Firmware. Teams must use VEXos version 1.1.5 or newer, found at https://link.vex.com/firmware. Custom firmware modifications are not permitted.
- The minimum version requirement is subject to change over the course of the season.
- When the minimum version is updated, Teams have a one week (7 calendar day) grace period from the time the minimum version is changed to update their firmware to the latest minimum version.
- VEX reserves the right to deem any firmware update critical, and remove the allowable grace period.
- Beta firmware, which includes any firmware version that ends with the letter ‘b’, is not legal for use in competition.
<R9> Use a “Competition Template” for programming. The Robot must be programmed to follow control directions provided by the VEXnet Field Controllers or Smart Field Control system.
During the Autonomous Period, Drive Team Members will not be allowed to use their V5 Controllers. As such, Teams are responsible for programming their Robot with custom software if they want to perform in the Autonomous Period.
This may be tested in inspection, where Robots may be required to pass a functional “enable/disable” test. For more information on this, Teams should consult the help guides produced by the developers of their chosen programming software.
<R10> Motors are limited. Robots may use any combination of V5 Smart Motors, 11W (276-4840) and/or 5.5W (276-4842), within the following criteria:
- The combined power of all motors (11W & 5.5W) must not exceed 88W. This limit applies to all motors on the Robot, even those which are not plugged in.
- V5 Smart Motors connected to Smart Ports are the only motors that may be used with a V5 Robot Brain. The 3-wire ports may not be used to control motors of any kind.
Example |
A |
B |
C |
D |
E |
Qty of 11W motors |
8 |
7 |
6 |
5 |
0 |
Qty of 5.5W motors |
0 |
2 |
4 |
6 |
16 |
This rule is applied differently for VEX U. See Rule <VUR11>.
<R11> Motors are limited for Subsystem 2 (see <R1>) Robots may use any combination of V5 Smart Motors, 11W (276-4840) and/or 5.5W (276-4842), in Subsystem 2 within the following criteria:
- The combined power of all motors in Subsystem 2 must not exceed 55W.
- Motors used in Subsystem 2 cannot provide power to any mechanism that is not a part of Subsystem 1.
- Motors in Subsystem 2 cannot be toggled, engaged, or configured such that they are capable of providing power to any part of the Robot that is not a part of Subsystem 1
- Teams may be required to demonstrate what each motor is capable of powering on their Robot during inspection in order to satisfy this requirement.
This rule does not apply to VEX U. See <VUR11>
<R12> Electrical power comes from VEX batteries only. Robots may use one (1) V5 Robot Battery (276-4811) to power the V5 Robot Brain.
- No other sources of electrical power are permitted, unless used as part of a non-functional decoration per <R23e>.
- There are no legal power expanders for the V5 Robot Battery.
- V5 Robot Batteries may only be charged by a V5 Robot Battery Charger (276-4812 or 276-4841).
- V5 Controllers (276-4820) may only be powered by their internal rechargeable battery.
- Teams are permitted to have an external power source (such as a rechargeable battery pack) plugged into their V5 Controller during a Match, provided that this power source is connected safely and does not violate any other rules, such as <R28>.
- Some events may choose to provide Field power for V5 Controllers. If this is provided for all Teams at the event, then this is a legal power source for the V5 Controllers.
This rule is applied differently for VEX U. See Rule <VUR12>.
<R13> Robots use VEXnet. Robots must ONLY utilize VEXnet for all wireless Robot communication.
- Electronics from the Cortex, VEX EXP, VEX CTE. VEXpro, VEX RCR, VEXplorer, VEX IQ, VEX GO, or VEX Robotics by HEXBUG product line are prohibited unless otherwise noted in <R16>.
- Teams are permitted to use the Bluetooth® capabilities of the V5 Robot Brain and/or V5 Controller in Team pits, practice Fields, and Robot Skills Matches. However, VEXnet must be used for wireless communication during Head-to-Head Matches.
- Teams are permitted to use the Wi-Fi capabilities of the Vision Sensor in Team pits or outside of Matches. However, the Vision Sensor must have its wireless transmitting functionality disabled during Matches.
This rule is applied differently for VEX U. See Rules <VUR2>, <VUR10> and <VUR12>.
<R14> Give the radio some space. The V5 Radio should be mounted such that no metal surrounds the radio symbol on the V5 Radio. While failure to do so will affect Robot performance, it will not prevent the Robot from passing inspection.
It is fine to loosely encapsulate the V5 Radio within Robot structure. The intent of this rule is to minimize radio connection issues by minimizing obstructions between VEXnet devices. Burying a radio deep within a Robot may result in Robot communication issues. It is also recommended that the LEDs on the radio be visible to aid in troubleshooting.
<R15> One or two Controllers per Robot. No more than two (2) VEX V5 Controllers may control a single Robot.
- No physical or electrical modification of these Controllers is allowed under any circumstances.
- Attachments which assist the Drive Team Member in holding or manipulating buttons/joysticks on the V5 Controller are permitted, provided that they do not involve direct physical or electrical modification of the Controller itself.
- No other methods of controlling the Robot (light, sound, etc.) are permissible.
- Using sensor feedback to augment driver control (such as motor encoders or the Vision Sensor) is permitted.
<R16> Robots are built from the VEX V5 system. Robots may be built ONLY using official VEX
V5 components, unless otherwise specifically noted within these rules.
- All legal parts for the V5 system are listed in the V5 Competition Legal Parts List.
- Any questions or concerns about legal parts should be directed to the official Q&A System on events.vex.com.
This rule is applied differently for VEX U. See Rule <VUR2>.
<R17> New VEX parts are legal. Additional VEX components released during the competition season on www.vexrobotics.com are considered legal for use unless otherwise noted.
Some “new” components may have certain restrictions placed on them upon their release. These restrictions will be documented in the official Q&A, in a Game Manual update, or in the VEX V5 Legal Parts List.
<R18> Prohibited Items. The following types of mechanisms and components are NOT allowed.
- Those that could potentially damage Field Elements or Scoring Objects.
- Those that could potentially damage other competing Robots.
- Those that pose an unnecessary risk of Entanglement with other Robots or Field Elements.
- Those that could pose a potential safety hazard to Drive Team Members, event staff, or other humans.
- Products from the VEXpro, VEX EXP, VEX IQ, VEX GO, VEX 123, VEX CTE, VEX AIM, VEX AIR, VEX Robotics by HEXBUG*, or any other VEX product lines, unless specifically allowed by a clause of <R16> or listed in the VEX V5 Legal Parts List (See <R16> ).
- Components obtained from the V5 beta program. All V5 beta hardware can be identified by its lighter gray pre-production color. Robot Brains, Robot Batteries, Controllers, and Vision Sensors from the V5 beta have a “BETA TEST” stamp on them. Smart Motors and Radios do not have this stamp, but can still be identified by color.
- Standalone VEX Smart Field Controller Brains (SKU 276-7577).
- VEX apparel, competition support materials, packaging, or other non-Robot products.
- Field Elements or components of Field Elements that are not otherwise explicitly legal materials (e.g., screws, standoffs, nuts, or non-shattering plastic within the limitations of <R24> ).
- 3D printed Robot parts for any purpose, including non-functional decorations and license plates.
- Speakers and other audio devices that create sound.
3D printed Controller attachments, 3D printed Robot alignment tools, and/or other custom 3D printed tools that do not go onto the Robot or into the Field during a Match are not considered Robot parts, and may be legal for use if they meet the requirements of other pertinent rules.
This rule is applied differently for VEX U. See Rules <VUR2>, <VUR5>, <VUR6>, & <VUR13>.
* The HEXBUG brand is a registered trademark belonging to Spin Master Corp<R19> Certain non-VEX components are allowed. Robots are allowed the following additional components from sources other than VEX Robotics:
- Any non-aerosol-based grease or lubricating compound, when used in extreme moderation on surfaces and locations that do NOT contact the playing Field walls, foam Field tiles, Scoring Objects, or other Robots. Grease or lubricant applied directly to V5 Smart Motors or Smart Motor cartridges is prohibited.
- Anti-static compound, when used in extreme moderation (i.e., such that it does not leave residue on Field Elements, Scoring Objects, or other Robots ).
- Hot glue when used to secure cable connections.
- An unlimited amount of non-elastic rope/string, no thicker than 1/4” (6.35mm).
- Commercially available items used solely for bundling or wrapping of 2-wire, 3-wire, 4-wire, or V5 Smart Cables, and/or pneumatic tubing are allowed. These items must solely be used for the purposes of cable/tubing protection, organization, or management. This includes but is not limited to electrical tape, cable carrier, cable track, etc. It is up to inspectors to determine whether a component is serving a function beyond protecting and managing cables and tubing.
- Rubber bands no larger than 7.5” long and 0.25” wide.
- Anti-slip drawer liner with similar nominal dimensions to VEX Anti-Slip Mat (275-0120 or 275-0121). The pattern of the matting should be similar to VEX Anti-Slip Mat, and there should be no additional performance gained by using non-VEX anti-slip drawer liner (i.e., no additional elasticity, adhesive backing, etc.). No piece of anti-slip drawer liner can be larger than 12” x 15” and all anti-slip drawer liner must be black in color.
- Plastic zip ties no larger than 12” long and 0.25” wide.
- A Micro SD card installed in the V5 Robot Brain.
- Aerosol-based cooling/freeze spray may be used to assist in cooling motors. Teams using freeze spray or similar products in ways that may reasonably be deemed unsafe could be subject to <S1> Violations.
- Cleaners, disinfectants, and/or sanitizers may be used to assist in cleaning Robots, parts, components, etc.
- See rules <R21> through <R25> for additional legal non-VEX components.
This rule is applied differently for VEX U. See Rules <VUR3>, <VUR4>, <VUR7>, <VUR8>, <VUR9>, <VUR12>, <VUR14>& <VUR15>.
<R20> Custom V5 Smart Cables are allowed. Teams who create custom cables acknowledge that incorrect wiring may have undesired results.
- Official V5 Smart Cable Stock must be used.
- Use of non-VEX 4P4C connectors and 4P4C crimping tools is permissible.
- V5 Smart Cables may only be used for connecting legal electronic devices to the V5 Robot Brain.
<R21> A limited amount of tape is allowed. Robots may use a small amount of tape for the following purposes:
- To secure any connection between the ends of two (2) VEX cables.
- To label wires, motors, Robot Brains, and/or controllers.
- To prevent leaks on the threaded portions of pneumatic fittings. This is the only acceptable use of Teflon tape.
- In any other application that would be considered a “decoration” per <R23>.
- As an aglet at the end of rope/string to prevent fraying.
<R22> Certain non-VEX fasteners are allowed. Robots may use the following commercially available hardware:
- #4, #6, #8, M3, M3.5, or M4 screws up to 2.5” (63.5 mm) long, and M2.5 x 8mm screws.
- Shoulder screws with a shoulder length no longer than 0.20” and a diameter no larger than 0.176”.
- Any commercially available nut, washer, threaded standoff up to 6” (152.4mm) long, and/or non-threaded spacer up to 2.5” (63.5mm) long which fits these screws.
This rule is applied differently for VEX U. See Rule <VUR9>.
<R23> Visual decorations are allowed. Teams may add non-functional decorations, provided that they do not affect Robot performance in any significant way or affect the outcome of the Match. These decorations must be in the spirit of the competition. Inspectors and Head Referees will have final say in what is considered “non-functional.” Unless otherwise specified below, non-functional decorations are governed by all standard Robot rules.
To be considered “non-functional,” decorations must be backed by legal materials that provide the same functionality. For example, if a Robot has a giant decal that prevents Scoring Objects from falling out of the Robot, the decal must be backed by VEX material that would also prevent the Scoring Objects from falling out. A simple way to check this is to determine if removing the decoration would impact the performance of the Robot in any way.
- Anodizing, painting, dyeing, or otherwise changing the color of any legal VEX part is considered a legal nonfunctional decoration.
Note: For official events held in mainland China, anodizing, painting, dyeing, or otherwise changing the color of any legal VEX part is prohibited.
- Small cameras are permitted as non-functional decorations, provided that any transmitting functions or wireless communications are disabled. Unusually large cameras used as ballast are not permitted.
- VEX electronics may not be used as non-functional decorations.
- Decorations that visually mimic Field Elements or Scoring Objects are not permitted. The inspector and Head Referee will make the final decision on whether a given decoration or mechanism violates this rule.
- Decorations cannot be designed to intentionally interfere with opponent Vision or Color Sensors. Teams will be asked to remove these decorations if the inspector or Head Referee determines that it interferes with opponent systems.
- Decorations which provide feedback to a Robot (e.g., by influencing legal sensors) would be considered “functional,” and are not permitted.
- Decorations that cover or obscure identifying features of electronics and/or pneumatics parts are not legal.
- Teams will be asked to either replace the electronics and/or pneumatics part entirely, or remove the decoration if possible.
- Identifying features include, but are not limited to, VEX logos, part numbers, and other distinctive colors or features of the part that allow an inspector to easily confirm it is a legal part.
<R24> A limited amount of custom plastic is allowed. Robots may use custom-made pieces cut from certain types of non-shattering plastic, up to 0.070” (1.78mm) thick.
- Each Robot is limited to a maximum of 12 individual pieces cut from non-shattering plastic. This includes non-shattering plastic used in non-functional decorations.
- Each individual piece of non-shattering plastic cannot be larger than 4” x 8” x 0.070”.
- Teams must present and display ALL non-shattering plastic parts during inspection.
- Inspectors will verify the total number of plastic pieces. They may use dry-erase markers or other forms of temporary marking to aid in counting.
- Inspectors will verify that no non-shattering piece exceeds the size limitation.
- Plastic may be mechanically altered by cutting, drilling, bending, etc. It cannot be chemically treated, melted, cast, or bonded to another part. Heating non-shattering plastic to aid in bending is acceptable.
- Legal plastic types are polycarbonate (Lexan), acetal monopolymer (Delrin), acetal copolymer (Acetron GP), POM (acetal), ABS, PEEK, PET, HDPE, LDPE, nylon (all grades), polypropylene, PTFE, and FEP.
- Shattering plastics, such as PMMA (also called plexiglass, acrylic, or perspex), and structurally non-homogeneous plastics, such as woven (e.g., SRPP) and/or fiber-reinforced sheets, are prohibited.
- Plastic sheets sold by VEX (such as the 276-8340 PET Sheets) are considered custom plastic in the context of this rule, and are subject to the same limitations as other plastic parts.
- This rule does not apply to 3D printed plastic parts. 3D printed Robot parts are not permitted in the VEX V5 Robotics Competition for any purpose, including non-functional decorations.
Note: Teams are strongly encouraged to provide inspectors with 1:1 scale drawings, identical spares, or 1:1 scale tracings of their non-shattering plastic pieces to aid in inspection. Drawings and tracings should accurately reflect ALL shapes and dimensions of each piece. Complex bent/cut parts, and parts that are cut diagonally across a 4”x8” sheet to gain length may require more evidence.
This rule is applied differently for VEX U. See Rules <VUR3> & <VUR4>.
This rule has additional Violation notes. See Appendix C.
<R25> Pneumatics are limited. A Robot’s pneumatic subsystem must satisfy all of the following criteria:
- Teams may use a maximum of two (2) VEX Air Tanks (276-8749) on a Robot.
- Pneumatic devices may be charged to a maximum of 100 psi.
- The compressed air contained inside a pneumatic subsystem can only be used to actuate legal pneumatic devices (e.g., cylinders).
This rule is applied differently for VEX U. See Rule <VUR14>.
<R26> The VEX Pressure Gauge (276-8748) is a required part if a Robot includes pneumatics.
- The gauge must be plumbed to the high pressure side of the system if the Team is using a regulator.
- The pressure gauge must be visible and readable by referees and inspectors without moving or removing other Robot components or mechanisms.
- The pressure gauge will be used to verify that the pneumatics system is charged to no more than 100psi, per <R25>.
- The VEX Pressure Gauge on the Robot will take precedence over any off-board measurement.
<R27> Most modifications to non-electrical components are allowed. Physical modifications, such as bending or cutting, of legal metal structure or plastic components are permitted.
- Modifying the arm of limit switches (by bending or trimming) or removing the rubber cap of bumper switches is permitted.
- Metallurgical modifications that change fundamental material properties, such as heat treating or melting, are not permitted.
- Pneumatic tubing may be cut to desired lengths.
- Fusing/melting the end of legal nylon rope/string (see <R19d>) to prevent fraying is permitted.
- Welding, soldering, brazing, gluing, or attaching parts to each other in any way that is not provided within the VEX platform is not permitted. Rule <R19c> is an exception to this rule.
- Mechanical fasteners may be secured using Loctite or a similar thread-locking product. This may ONLY be used for securing hardware, such as screws and nuts.
This rule is applied differently for VEX U. See Rules <VUR3>, <VUR12>& <VUR13>.
<R28> No modifications to electronic or pneumatic components are allowed. Motors (including the V5 Smart Motor firmware), microcontrollers (including V5 Robot Brain firmware), cables, sensors, controllers, battery packs, reservoirs, solenoids, pneumatic cylinders, and any other electrical or pneumatics component of the VEX platform may NOT be altered from their original state in ANY way.
- Teams may make the following modifications to the V5 Smart Motor (11W)’s user-serviceable features. This list is all-inclusive; no other modifications are permitted. Where applicable, the components listed below (in the specific applications listed below) are permissible exceptions to <R19>.
- Replacing the gear cartridge with other official cartridges.
- Removing or replacing the screws from the V5 Smart Motor Cap (276-6780).
- Removing or replacing the threaded mounting inserts (276-6781).
- Aesthetic/non-functional labeling (e.g., markers, stickers, paint, etc.).
- V5 Smart Motors (11W) must use an official VEX V5 gear cartridge. For the purposes of this rule, the gear cartridges found within the V5 Smart Motor are considered “part of the motor.” Therefore, any physical or functional modifications to official gear cartridges is not permitted. V5 Smart Motors (11W) may only use official VEX motor cartridges
- For the purposes of this rule, the V5 Smart Motor Cap is not considered “part of the motor.” Therefore, <R27> applies.
- External wires on VEX 2-wire or 3-wire electrical components may be repaired by soldering or using twist/crimp connectors, electrical tape, or shrink tubing such that the original functionality and length are not modified in any way.
- Wire used in repairs must be identical to VEX wire.
- Teams make these repairs at their own risk; incorrect wiring may have undesired results.
- V5 Robot Brain accessories (short flanges, long flanges, and the magnetic screen protector) are considered “part of the V5 Robot Brain” and cannot be modified.
Section 5 - The Tournament
Overview
The VEX V5 Robotics Competition consists of Head-to-Head Matches, Robot Skills Matches, and optional judging. This section describes how Head-to-Head Matches and Robot Skills Matches are to be played at a given event.
Awards may be given to top Teams in each format, as applicable. Awards may also be given for overall performance in the judged criteria.
Tournament Rules
<T1> Head Referees have ultimate and final authority on all gameplay and Robot ruling decisions during the competition.
- Scorekeeper Referees score the Match, and may serve as observers or advisers for Head Referees, but may not determine any Violations directly.
- When issuing a Major Violation or Minor Violation to a Team, Head Referees must provide the rule number of the specific rule that has been Violated, and must record the Violation on the Match Anomaly Log.
- Event Partners may not overrule a Head Referee’s gameplay or Robot decisions.
- Every Qualification Match and Elimination Match must be watched by a certified Head Referee. A Head Referee may only watch one Match at a time; if multiple Matches are happening simultaneously on separate Fields, each Field must have its own Head Referee. Head Referees must follow the rules in this game manual and the Q&A, and must make rulings consistent with the intent of the game manual and Q&A.
- At a minimum, every Robot Skills Match must be watched by a trained Scorekeeper Referee, who may only watch one Match at a time. If multiple Robot Skills Matches are happening simultaneously on separate Fields, each Field must have its own Scorekeeper Referee. A certified Head Referee must be available at the event to explain a rule, Disqualification, Violation, or other penalty to Teams in Robot Skills Matches as needed in support of the Scorekeeper Referees at skills Fields.
<T2> Head Referees must be qualified. V5RC Head Referees must have all of the following qualifications:
- Be at least 20 years of age.
- Be approved by the Event Partner.
- Be a certified V5RC Head Referee for the current season.
- Cannot be the Event Partner or a Judge Advisor for the event.
Note: Scorekeeper Referees must be at least 15 years of age, and must be approved by the Event Partner.
<T3> Drive Team Members are permitted to immediately appeal a Head Referee’s ruling. If Drive Team Members wish to dispute a score or ruling, they must stay in the Alliance Station until the Head Referee from the Match talks with them. The Head Referee may then choose to meet with the Drive Team Members at another location and/or at a later time so that the Head Referee has time to reference materials or resources to help with the decision. Once the Head Referee announces that their decision has been made final, the issue is over and no more appeals may be made (See rule <T1> ); failure to accept this final decision may be considered a <G1> Violation. There is no system or opportunity for an appeal of the Head Referee’s final decision, either at or after the event.
- Referees are not permitted to review any photo or video Match recordings when determining a score or ruling. Some events may also prohibit Drive Team Members from reviewing photo or video Match recordings while in the Alliance Station ; this should be announced to all Teams before Matches start.
- Head Referees are the only individuals permitted to explain a rule, Disqualification, Violation, or other penalty to the Teams in a Head-to-Head Match. Teams should never consult other field personnel, including Scorekeeper Referees, regarding a ruling clarification.
Communication and conflict resolution skills are an important life skill for Students to practice and learn. In the VEX V5 Robotics Competition, we expect Students to practice proper conflict resolution using the proper chain of command. Violations of this rule may be considered a Violation of <G1>.
<T4> The Event Partner has ultimate authority regarding all non-gameplay decisions during an event. The Game Manual is intended to provide a set of rules for successfully playing V5RC Override; it is not intended to be an exhaustive compilation of guidelines for running a VEX V5 Robotics Competition event. Rules such as, but not limited to, the following examples are at the discretion of the Event Partner and should be treated with the same respect as the Game Manual.
- Venue access
- Pit spaces
- Health and safety
- Team registration and/or competition eligibility
- Team conduct away from competition Fields
This rule exists alongside <G1>, <S1>, and <G3>. Even though there isn’t a rule that says “do not steal from the concession stand,” it would still be within an Event Partner’s authority to remove a thief from the competition.
<T5> Be prepared for minor Field variance. Field Element tolerances and Scoring Objects may vary from specified locations/dimensions; Teams are encouraged to design their Robots accordingly. Please make sure to check Appendix A for more specific nominal dimensions and tolerances.
- Field Element tolerances may vary from nominal by up to ±1.0”.
- Scoring Object placement at the beginning of the Match may vary from nominal by up to ±1” (25.4mm). If a Scoring Object is within tolerance, it should not be adjusted before the Match.
- The rotation of Scoring Objects is not specified. If a Scoring Object is within tolerance, either on the Field or within a Loader, it should not be adjusted before the Match.
The Field Perimeter and Field Elements are designed to be assembled and disassembled multiple times each year. Event Partners store and transport Fields between events, and the individuals setting up the Field at one event may differ from those at the next. While every effort will be made to ensure minimal variance, Teams should expect that any Field may be slightly different than another, and prepare accordingly. Just because something works on one Field does not fully guarantee it will work on the next, and is not enough evidence alone to determine if a Field is out of tolerance.
<T6> Fields may be repaired at the Event Partner’s discretion. All competition Fields at an event must be set up in accordance with the specifications in Appendix A and/or other applicable Sections. Minor aesthetic customizations or repairs are permitted, provided that they do not impact gameplay (see <T4> ).
Examples of permissible modifications include, but are not limited to:
- Applying threadlocker to Field Element mounting hardware
- Using non-VEX electrical tape to add required lines to the Field
- Anchoring Field Elements directly to Field risers instead of the metal plates
- Anchoring the metal plates to the underlying surface with hardware or tape
- Utilizing a non-VEX Strap under the Field to tie walls together
- Parts added to the exterior of the Portable Field Perimeter to assist in assembly, transportation, and rigidity during Matches
- Custom solutions for mounting Toggle brackets to metal Field Perimeters. See Appendix A drawing titled “Toggle Mounting - Metal Field Perimeter” for examples.
- Adjust the size/position of the Alliance Station tape lines.
Note: Exact dimensions/positioning of the Alliance Stations are subject to Event Partner discretion. Alliance Station tape lines should always be placed such that Drive Team Members can reasonably view and interact with the Field from within the Alliance Station during a Match (e.g., Drive Team Members can easily reach Loaders from within the Alliance Station).
Modifications that may impact Robot functionality and/or how the game is played are generally not allowed. Examples of prohibited modifications include, but are not limited to:
- Unofficial Field Perimeter walls, additional structural elements inside of the Field Perimeter, or unofficial/replica Field Elements
- Additional VEX structural parts attached to a Field Element
- Replacing the opaque Field walls on the VEX Portable Competition Field Perimeter with transparent panels
- Assembling a VEX Portable Competition Field Perimeter without including the securing straps
- Affixing stickers to the foam Field Tiles or otherwise marking object placements for Field reset
Any specific repairs and/or modifications which pertain to the current season’s game will be documented in this rule and Appendix A, as needed.
<T7> Fields at an event must be consistent with each other. There are many types of permissible aesthetic and/or logistical modifications that may be made to competition Fields at the Event Partner’s discretion (see <T6> ). If an event has multiple Head-to-Head competition Fields, they must all incorporate the same permissible/applicable modifications. If an event has multiple Robot Skills Challenge Fields, they must all incorporate the same permissible modifications. For example, if one Head-to-Head competition Field is elevated, then all Head-to-Head competition Fields must be elevated to the same height.
Examples of these modifications may include, but are not limited to:
- Elevating the playing Field off of the floor (common heights are 12” to 24” [30.5cm to 61cm])
- Field control systems (see <T8> )
- Field display monitors
- Field Perimeter decorations (e.g., LED lights, sponsor decals on polycarbonate panels)
- Field Perimeter type (see <T9> )
- Utilizing the VEX GPS Field Code Strips
- Utilizing non-VEX Straps to hold the Field walls together
Note: If an event has dedicated Fields for Robot Skills Matches, there is no requirement for them to have the same consistent modifications as the Head-to-Head Fields. See <T21> for more details.
<T8> There are three types of Field control that may be used.
- A VEXnet Field Controller controlled by Tournament Manager, which connects to a Controller’s competition port via ethernet cable.
- A V5 Event Brain controlled by Tournament Manager, which connects to a Controller via Smart Cable.
- A VEXnet Competition Switch, which connects to a Controller’s competition port via Cat-5 cable, may only be used in Practice Matches, Robot Skills Matches, and Leagues, and only under extreme circumstances.
If an event has multiple Fields, then all Fields of the same game type must use the same control system, in accordance with <T7> and <T21>. For example, it would be permissible for Head-to-Head competition Fields to use V5 Event Brains, and for Skills Challenge Fields to use VEXnet Field Controllers. However, it would not be permissible for one Head-to-Head Field to use a V5 Event Brain while another Head-to-Head Field uses a VEXnet Field Controller.
Note: Official Qualifying Events may only use the official, unmodified version of Tournament Manager for field control, along with approved hardware and networking solutions. Add-ons that abide by the TM Public API guidelines are permitted. Once add-ons are enabled, the software is no longer supported by VEX Robotics, or DWAB Technologies; any necessary troubleshooting will be done at the user’s own risk.
<T9> There are two types of Field Perimeter that may be used.
- VEX Metal Competition Field Perimeter (SKU 278-1501).
- VEX Portable Competition Field Perimeter (SKU 276-8242).
See Appendix A for more details.
If an event has multiple Fields, then all Fields of the same game type must use the same Field Perimeter type, in accordance with <T7> and <T21>. For example, it would be permissible for Head-to-Head competition Fields to use metal Field Perimeters, and for Skills Challenge Fields to use Portable Field Perimeters.
However, it would not be permissible for one Head-to-Head Field to use a metal Field Perimeter, while other Head-to-Head Fields use Portable Field Perimeters.
<T10> Qualification Matches follow the Match Schedule. A Qualification Match Schedule will be available on the day of competition. The Match Schedule will indicate Alliance partners, Match pairings, and Alliance colors for each Match. For Tournaments with multiple Fields, the schedule will indicate which Field each Match will take place on.
- Practice Matches may be included in the Match Schedule at some events, but are not required. If Practice Matches are run, every effort will be made to equalize practice time for all Teams.
- A Qualification Match can only start before its scheduled time if all Teams, Robots, and assigned volunteers are at the Field and ready to play.
- Any multi-division event must be approved by VEX Robotics prior to the event, and divisions must be assigned in sequential order by Team number.
- The Match Schedule is subject to change at the Event Partner’s discretion. Events should generally wait to generate the Match Schedule until all Teams have checked in and passed Robot Inspection, or when it has been confirmed that Teams will not be participating.
- If it is determined by both the Event Partner and VEX Robotics that a Team should be removed from further Matches at the event based on the outcome of a serious Violation, the Event Partner can use the full-event Disqualification feature in TM to remove that Team from all further Matches at the event. Their spots in later Qualification Matches will be replaced automatically by Teams from the end of the Match Schedule, and Matches will be removed from the end of the schedule as appropriate. The Event Partner cannot do this without permission from VEX Robotics.
<T11> Each Team will have at least six Qualification Matches.
- A Tournament must include a minimum of six Qualification Matches per Team at local qualifying events or eight Qualification Matches per Team at a Championship event. The recommended number of Qualification Matches per Team is eight for a standard Tournament, and up to ten for a championship event.
- A league must include at least three league ranking sessions, with at least one week between sessions. Each session must include a minimum of two Qualification Matches per Team at that session. The suggested number of Qualification Matches per Team for a standard league ranking session is four. Leagues will have a championship session where elimination rounds will be played. Event Partners may also choose to have Qualification Matches as part of their championship session.
<T12> Qualification Matches contribute to a Team’s ranking for Alliance Selection.
- When in a Tournament, every Team will be ranked based on the same number of Qualification Matches.
- For Tournaments that have more than one division, Teams will be ranked among all Teams in their specific division.
- When in a league, every Team will be ranked based on the number of Matches played. Teams that participate in at least 60% of the total Matches available will be ranked above Teams that participate in less than 60% of the total Matches available; e.g., if the league offers 3 ranking sessions with 4 Qualification Matches per Team, Teams that participate in 8 or more Matches will be ranked higher than Teams who participate in 7 or fewer Matches. Being a no-show to a Match that a Team is scheduled in still constitutes participation for these calculations.
- In some cases, a Team will be asked to play an additional Qualification Match. The extra Match will be identified on the Match Schedule with an asterisk; Win Points, Autonomous Points, and Strength of Schedule Points for that Qualification Match will not impact a Team’s ranking, and will not affect participation percentage for leagues.
- Teams are reminded that <G1> is always in effect and Teams are expected to behave as if the additional Qualification Match counted.
- In leagues, Teams may have a different number of Qualification Matches. Rankings are determined by the Win Percentage, which is the number of wins divided by the number of Qualification Matches that Teams have played.
<T13> Qualification Match tiebreakers. Team rankings are determined throughout Qualification Matches as follows:
- Average Win Points (Win Points / number of Matches played)
- Average Autonomous Points (Autonomous Points / number of Matches played)
- Average Strength of Schedule Points (Strength of Schedule Points / number of Matches played)
- Highest Match score
- Second-highest Match score
- Random electronic draw
<T14> Small Tournaments have fewer Alliances. The number of Alliances for a given event is determined as follows, except in extraordinary circumstances with the permission of VEX Robotics:
# of Teams |
# of Elimination Alliances |
32+ |
16 |
24-31 |
12 |
16-23 |
8 |
<16 |
# of Teams divided by 2, less any remainder |
This rule is applied differently for VEX U. See rule <VUT7>.
<T15> Send a Student representative to Alliance Selection. Each Team must send one Student representative to the playing Field (or other designated area) to participate in Alliance Selection. If the Team representative fails to report in for Alliance Selection, their Team will be ineligible for participation in the Alliance Selection process.
Once the Alliance Selection begins, Student representatives cannot use electronic devices unless they have been demonstrated to be in airplane mode. No electronic communication by or with Student representatives is allowed during the Alliance Selection process.
Teams are advised to complete their scouting prior to the beginning of Alliance Selection, and to come to Alliance Selection prepared with a written list of potential Alliance Partners. Non-electronic methods of communication are allowed. Rule <G2> and the Student-centered Policy still apply during Alliance Selection. Any communication about Alliance Selection and specific Teams should be limited to Student Team Members.
<T16> Each Team may only be invited once to join one Alliance. If a Team representative declines an Alliance Captain’s invitation during Alliance Selection, that Team is no longer eligible to be selected by another Alliance Captain. However, they are still eligible to play Elimination Matches as an Alliance Captain. This video includes a full explanation of the Alliance Selection process.
For example:
- Alliance Captain 1 invites Team 000A to join their Alliance.
- Team 000A declines the invitation.
- No other Alliance Captains may invite Team 000A to join their Alliance.
- However, Team 000A may still form their own Alliance if Team 000A is ranked high enough after Qualification Matches to become an Alliance Captain.
Note: Alliances must have two Teams, and there are no “do-overs” during Alliance Selection. If enough Teams decline their invitations such that the full number of Alliances cannot be filled, the event will proceed with a reduced number of Alliances.
<T17> Elimination Matches follow the Elimination Bracket. A sixteen (16) Alliance bracket plays as shown in Figure T17-1, with Matches proceeding in numbered order through each round.
If an event is run with fewer than 16 Alliances, then they will use the bracket shown in Figure T17-1, with Byes awarded when there is no applicable Alliance. For example, in a Tournament with 12 Alliances, Alliances 1, 2, 3, & 4 would automatically advance to the Quarterfinals.
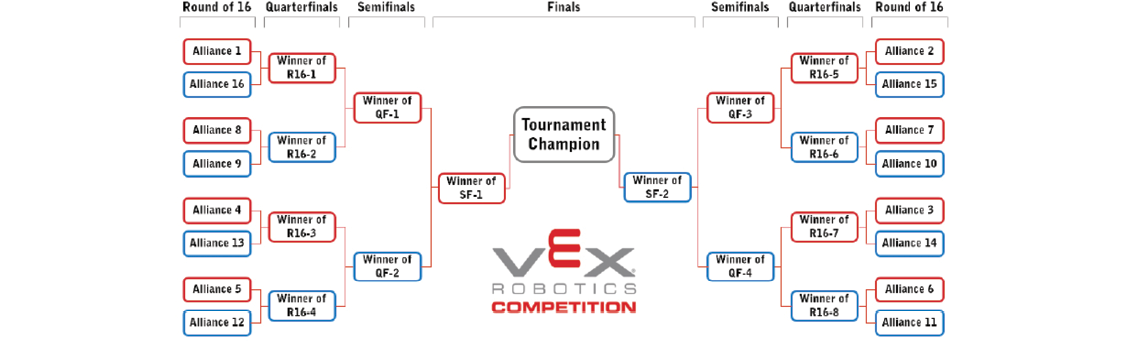
Figure T17-1: A 16-Alliance bracket
Thus, an eight (8) Alliance bracket would run as shown below:
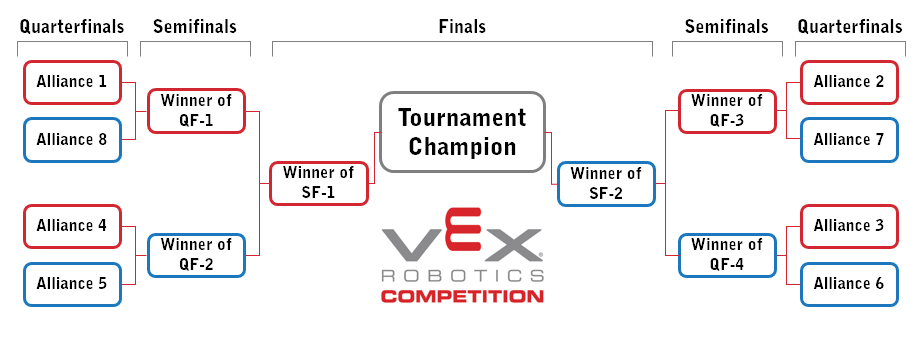
Figure T17-2: An 8-Alliance bracket
At events with multiple divisions, each division champion Alliance will advance to the overall event finals. Alliance color assignment for these Matches will be determined by the original Alliance seeding within their respective divisions. The higher seeded Alliance (e.g., 1 is higher than 2) will be designated as the red Alliance, and the lower-seeded Alliance will be designated as the blue Alliance.
If both Alliances hold the same seed number within their divisions, the Event Partner will conduct a coin flip to determine which Alliance is assigned to the red Alliance, with the remaining Alliance assigned to blue.
<T18> Elimination Matches are a blend of “Best of 1” and “Best of 3.” “Best of 1” means that the winning Alliance in each Match advances to the next round of the Elimination Bracket. “Best of 3” means that the first Alliance to reach two wins will advance.
See the flowchart below for more information.
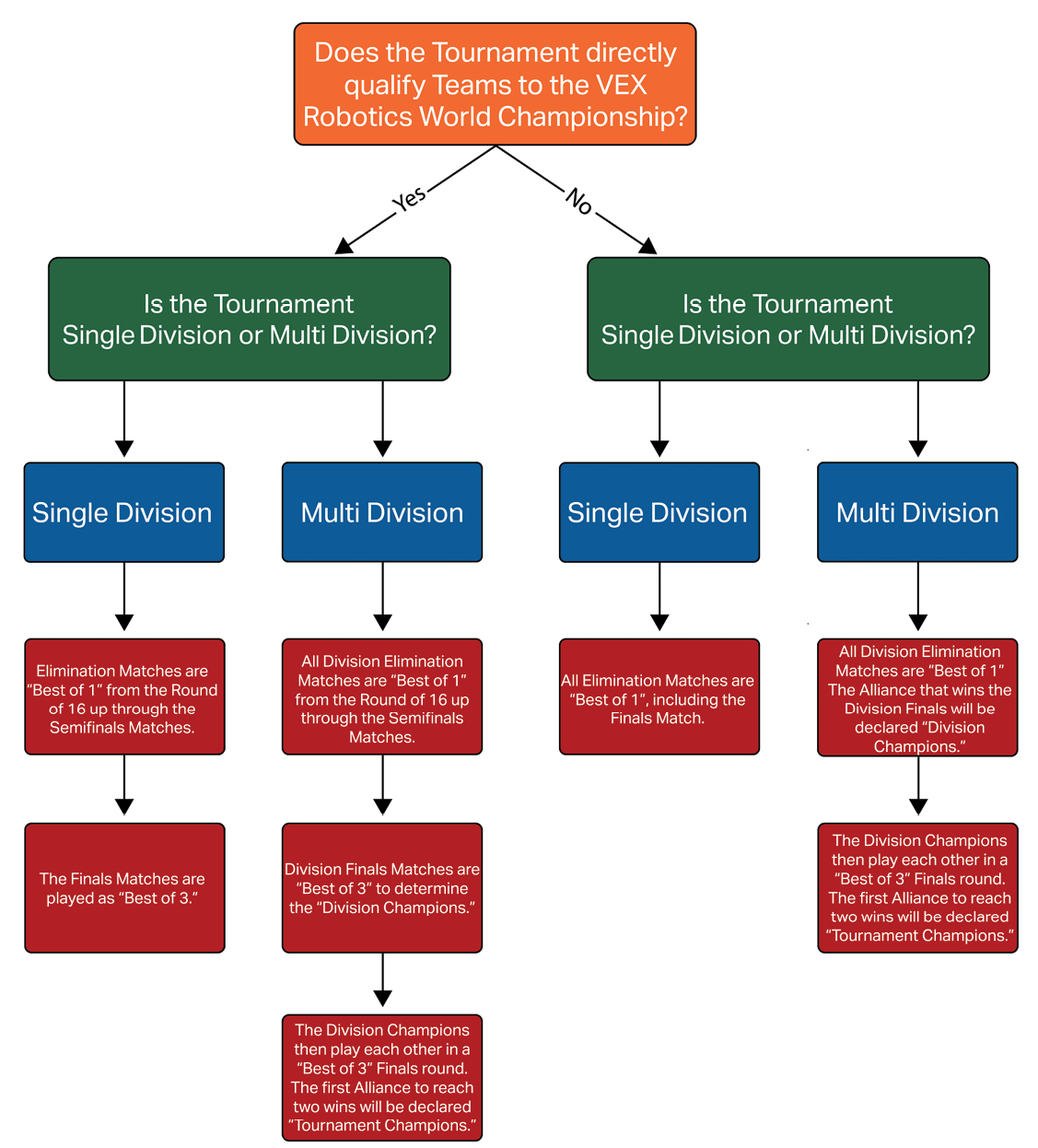
Figure T18-1: The process for determining how Elimination Matches should be played.
<T19> Ties in Elimination Matches lead to limited rematches. In the case of tied Matches during Elimination Matches, Tournament Manager will apply the following logic to determine which Alliance will progress to the next round.
- In a “Best of 1” Elimination Round, the higher-seeded Alliance will advance and be declared the winner under the following guidelines.
- For single-division events or within a division: in a ”Best of 3” Elimination Round, the higher-seeded Alliance will advance and be declared the winner under the following guidelines.
- For single-division events or within a division: after two (2) ties in a “Best of 3” Elimination Round in which one Alliance has won a single Match (1-0), the Alliance with one (1) win will be declared the winner.
- For a “Best of 3” overall Finals round at a multi-division event, Teams should continue to play tiebreaker Matches until one Alliance has won two (2) Matches.
<T20> Skills Match Schedule. Teams play Robot Skills Matches on a first-come, first-served basis. Each Team will get the opportunity to play exactly three (3) Driving Skills Matches and three (3) Autonomous Coding Skills Matches at each Tournament and/or League Session.
Teams should review the event agenda and their Match Schedule to determine when the best possible time is to complete their Robot Skills Matches. If the Robot Skills Challenge area closes before a Team has completed all six (6) Robot Skills Matches, but it is determined that there was adequate time given, then the Team will automatically forfeit those unused Matches.
<T21> There is no requirement that Skills Challenge Fields have the same consistent modifications as the Head-to-Head Fields. For example, there is no requirement that all Skills Challenge Fields are elevated to the same height as Head-to-Head Fields. However, all Skills Challenge Fields at a single event must use the same type of Field control and Field Perimeter, as described in rules <T8> and <T9>.
It is strongly recommended/preferred that all Skills Challenge Fields are consistent with each other, but this may not be the case in extreme circumstances. In order to use non-conforming Head-to-Head Fields for Skills Challenge runs (e.g. during lunch), the following steps should be taken:
- Teams must be informed that the Head-to-Head Fields may have some differences from the Skills Challenge Fields (e.g., they might not have GPS strips).
- Teams must be given an opportunity to select which type of Field they want to use, i.e. they cannot be required to use a Head-to-Head Field for any Skills Challenge run.
<T22> Skills Rankings at events. Teams will be ranked at an event based on the following scores and tiebreakers:
- Sum of highest Autonomous Coding Skills Match score and highest Driving Skills Match score.
- Highest Autonomous Coding Skills Match score.
- Second-highest Autonomous Coding Skills Match score.
- Second-highest Driving Skills Match score.
- Highest sum of Skills Stop Times (see rule <RSC5> ) from a Team’s highest Autonomous Coding Skills Match and highest Driving Skills Match (i.e., the Matches in point 1).
- Highest Skills Stop Time from a Team’s highest Autonomous Coding Skills Match (i.e., the Match in point 2).
- Third-highest Autonomous Coding Skills Match score.
- Third-highest Driving Skills Match score.
- If a tie cannot be broken after all above criteria, then the following ordered criteria will be used to determine which Team had the “best” Autonomous Coding Skills Match :
- If the tie still isn’t broken, the same process in Step 9 will be applied to each Team’s best Driving Skills Match.
- If the tie still isn’t broken, events may choose to allow Teams to have one more deciding Driving Skills Match, to be ranked according to the standard criteria above, or declare both Teams the Robot Skills Challenge Winner.
<T23> Skills Rankings Globally. Teams will be ranked globally based on their Robot Skills scores from Tournaments and Leagues that upload results to events.vex.com, according to the following tiebreakers:
- Highest Robot Skills score (combined Autonomous Coding Skills Match and Driving Skills Match Score from a single event).
- Highest Autonomous Coding Skills Match score (from any event).
- Highest sum of Skills Stop Times (see rule <RSC5> ) from the Robot Skills Matches used for point 1.
- Highest Skills Stop Time from the Autonomous Coding Skills Match used for point 2.
- Highest Driving Skills Match score (from any event).
- Highest Skills Stop Time from the Driving Skills Match score used for point 5.
- Earliest posting of the highest Autonomous Coding Skills Match score. The first Team to post a score ranks ahead of other Teams that post the same score at a later time, all else being equal.
- Earliest posting of the highest Driving Skills Match score. The first Team to post a score ranks ahead of other Teams that post the same score at a later time, all else being equal.
<T24> Robot Skills at League Events. At league events in which Teams may submit Robot Skills Challenge scores across multiple sessions, the Robot Skills scores (combined highest Autonomous Coding Skills Match and Driving Skills Match scores) used for rankings will be calculated from Matches within the same session.
For example, consider the following scores for a hypothetical Team across two league event sessions:
Robot Skills Score |
|||
Session 1 |
50 |
60 |
110 |
Session 2 |
40 |
100 |
140 |
This Team would have a Robot Skills score of 140 for this event, and their scores from Session 2 would be used for the Event and Global tiebreakers listed in <T22> and <T23>.
Section 6 - VEX U
Introduction
While many colleges and universities already use the VEX V5 system in their academic classes, many more have extensive manufacturing capabilities beyond the standard “VEX metal” library. Fabrication techniques like machining and 3D printing are more common than ever in collegiate engineering programs, and we can’t wait to see what VEX U Robotics Competition Teams from around the world are able to create under these more advanced rules.
As in past years, the season will include a culminating VEX U event at the VEX Robotics World Championship, along with regional Tournaments across the world. Participating schools will get the chance to prove their abilities in front of thousands of future engineers and show off what truly makes their school remarkable. The VEX U Robotics Competition is the perfect project-based supplement to many university level engineering programs, and gives Students the unique opportunity to demonstrate their real-world skills to potential employers, such as our event sponsors.
Game, Robot, and Tournament Rules
The VEX U Robotics Competition uses the VEX V5 Robotics Competition Override Field with some minor modifications. Anyone that has a V5RC Override Field can use it for a VEX U event or Team. Please consult earlier sections of this game manual for the basic set of competition rules and details. All of the standard rules apply, except for the modifications listed in this section. In the event of a conflict between rules, the rules listed in this Section of the game manual and any rulings on the official VEX U Q&A take precedence.
VURC Definitions
Additional Electronics - Any Sensor, processor, or other electronic component used in Robot construction, and connected to the V5 Robot Brain, that is not sold by VEX Robotics. Examples include commercially-available devices (e.g., Raspberry Pi) or custom devices designed and fabricated by the Team. See <VUR12> and <VUR13> for more details.
Alliance - A grouping of two (2) Robots from the same Team that have been chosen by the Students to play together during a given Match.
Electromechanical Assembly - A complex system composed of multiple off-the-shelf components, which may include Sensors, mechanical parts, and actuators.
External Processor - A computing device or microcontroller that independently processes Sensor data before sending it to the VEX V5 Brain.
Fabricated Part - Any component used in Robot construction that is fabricated by Team members. See <VUR3> through <VUR7> for more details.
Raw Stock - Stock materials purchased from third-party vendors that may be used to create Fabricated Parts. See <VUR4> and <VUR5>.
Sensor - A device that detects and responds to changes in the environment, providing data to the Robot’s control system.
VEX U Student - A Team member that meets all criteria listed in rule <VUT6>.
Rule Modifications: Field Setup
The VURC playing Field is set up differently than a Head-to-Head VEX V5 Robotics Competition Override Match, with the following modifications:
- The VEX GPS code strip must be installed on the Field.
- Modified Field layout. Only the Midfield Goal should begin the Match with a yellow/yellow Pin Placed in it.
- Modified Match Loads. Each Alliance gains an additional two yellow/yellow Pins that begin off the Field as Match Loads.
- Red Alliance Match Loads : 10 Cups, 10 red/yellow Pins, and 3 yellow/yellow Pins
- Blue Alliance Match Loads : 10 Cups, 10 blue/yellow Pins, and 3 yellow/yellow Pins
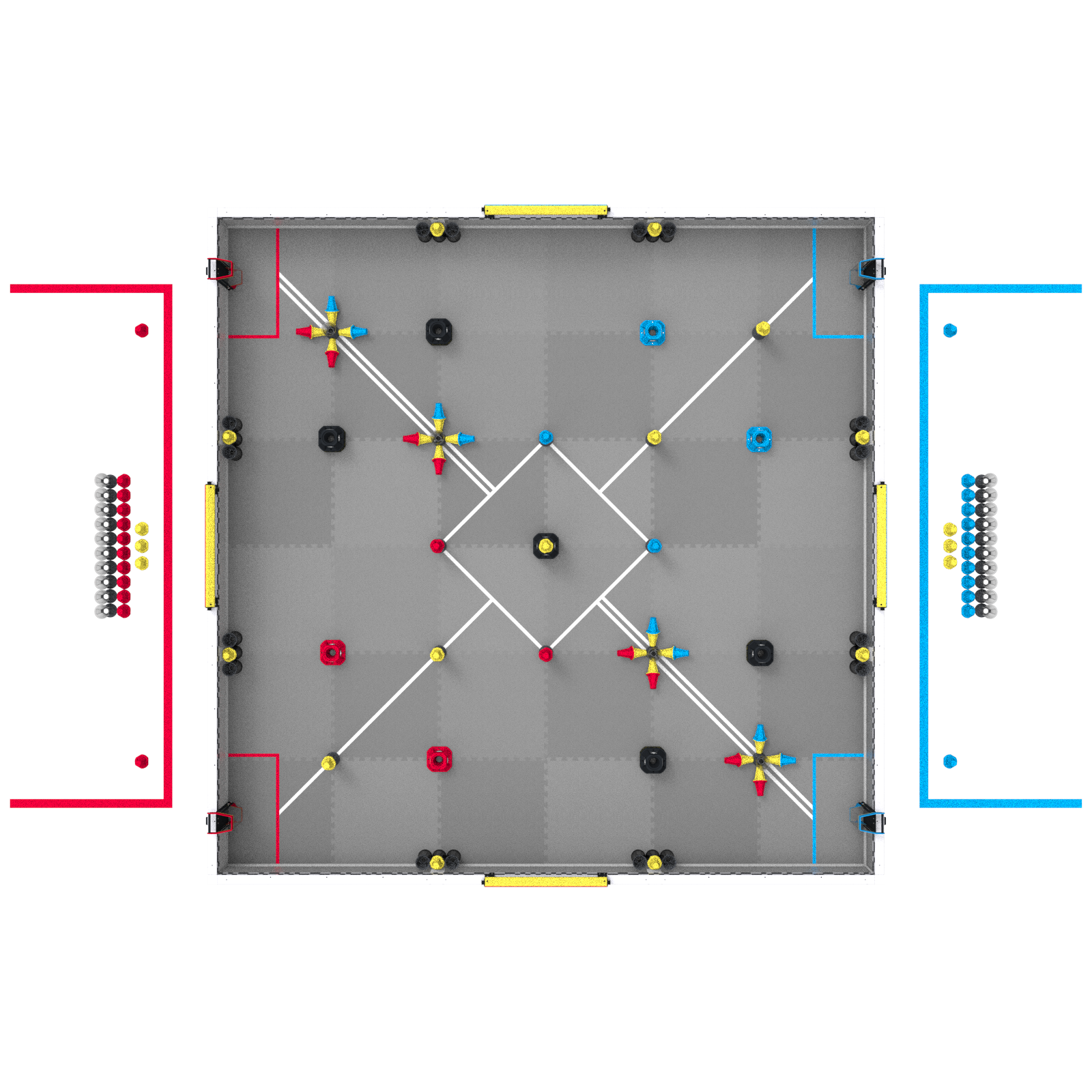
Figure VEXU-1: An overhead view of the Field setup for a VEX U Match.
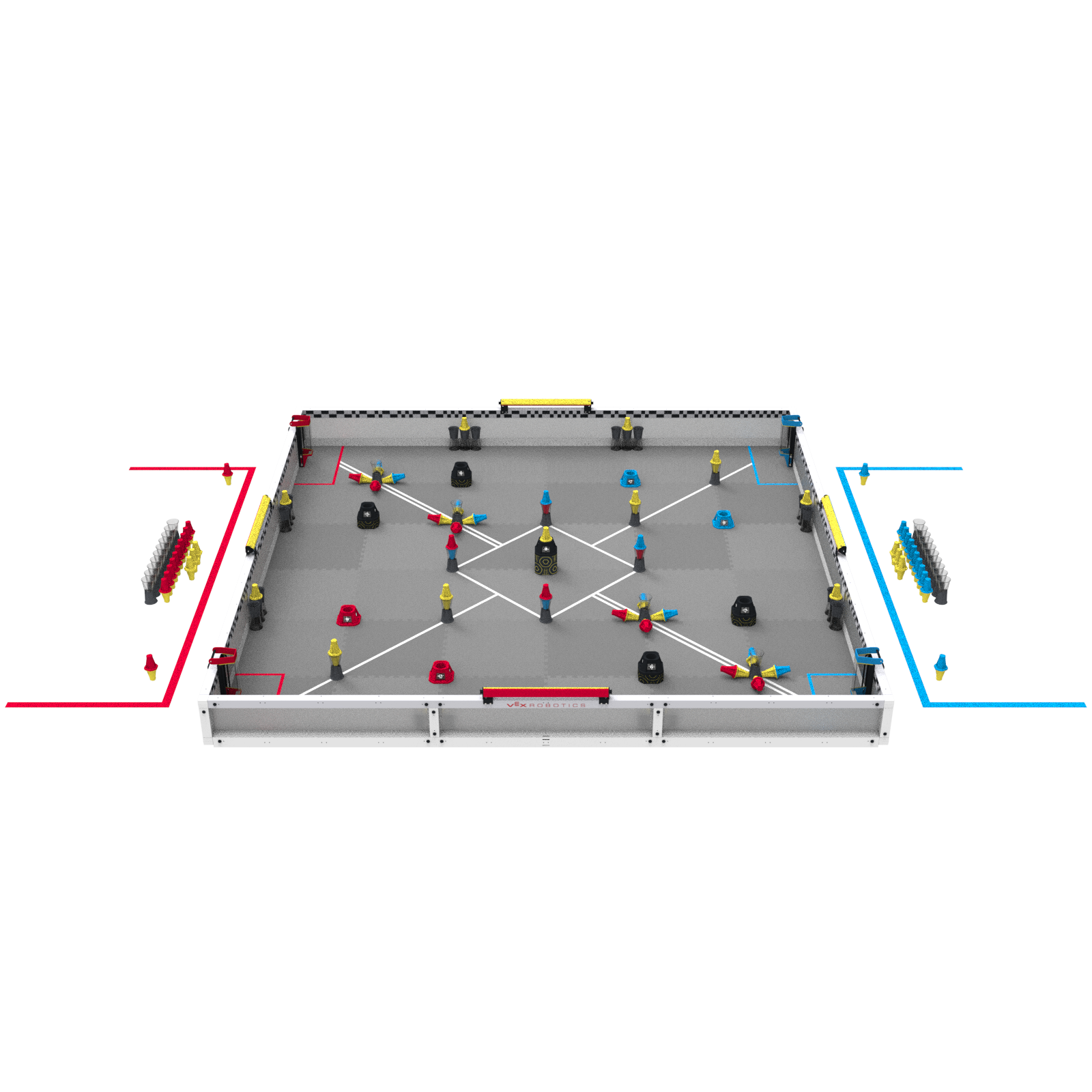
Figure VEXU-2: A side view of the Field setup for a VEX U Match.
Rule Modifications: Game
<VUG1> Different Robot starting sizes. See <VUR1>.
<VUG2> Different Robot placement than rule <GG10>. The red Team has the right to place one Robot on the Field first, followed by both blue Robots, and ending with the 2nd red Robot. This applies in Qualification Matches and Elimination Matches. If this right is used, once a Team has placed a Robot on the Field, its position cannot be readjusted prior to the Match.
<VUG3> Some electronic devices may be in motion or moving at the beginning of the Match. This includes active cooling fans, spinning LIDAR modules, and/or other similar sensors or Additional Electronics. These electronic devices should not initiate any form of motion for the entire Robot or any of its subsystems, and may not directly interact with Scoring Objects and/or other Robots.
<VUG4> Different availability of Loaders. Drive Team Members may introduce Match Load Scoring Objects into the Loaders adjacent to their Alliance Station during the Autonomous Period and Driver Controlled Period of the Match.
<VUG5> Different scoring during the Autonomous Period. The following are included in the calculation of an Alliance’s score for the purposes of determining the Autonomous Bonus :
- A yellow Pin that is Placed in the Midfield is Owned by the Alliance that ends the Autonomous Period with a greater number of Robots in the Midfield.
- Points for ending the Autonomous Period in the Midfield.
<VUG6> Different Autonomous Win Point criteria. An Autonomous Win Point is awarded to any Alliance that ends the Autonomous Period with all of the following tasks completed, and that has committed no Violations during the Autonomous Period :
- At least twelve (12) Pins Scored for your Alliance. (Does not include Pins Placed in Quadrants on the opposing side of the Autonomous Line ).
- At least four (4) Goals each contain at least two (2) Pins Scored for your Alliance. (Does not include Goals in Quadrants on the opposing side of the Autonomous Line ).
- Neither Robot is contacting the Field Perimeter.
- At least one (1) Robot is within the Midfield.
<VUG7>Different Load Zone protection. Load Zone protections (see rule <SG13>) apply during both the Autonomous Period and Driver Controlled Period of the Match.
Rule Modifications: Robot Skills Challenge
All rules apply from V5RC Section 3: Robot Skills Challenge, with no modifications other than those noted below.
<VURS1> VEX U Robot Skills Matches are set up differently than VEX V5 Robotics Competition Robot Skills Matches, with the following modification:
- Modified Match Loads. Four (4) red/yellow Pins, six (6) blue/yellow Pins, and ten (10) Cups begin off the Field as Match Loads. See figure VURS1.
<VURS2> Teams are permitted to use both Robots in their VEX U Robot Skills Matches, per <VUT1> and <VUR1>.
<VURS3> Both Robots must start the Robot Skills Match in legal starting positions for the red Alliance. All other portions of rule <SG1> apply. Each Robot must use one red/yellow Pin as a Preload in accordance with <SG5>.
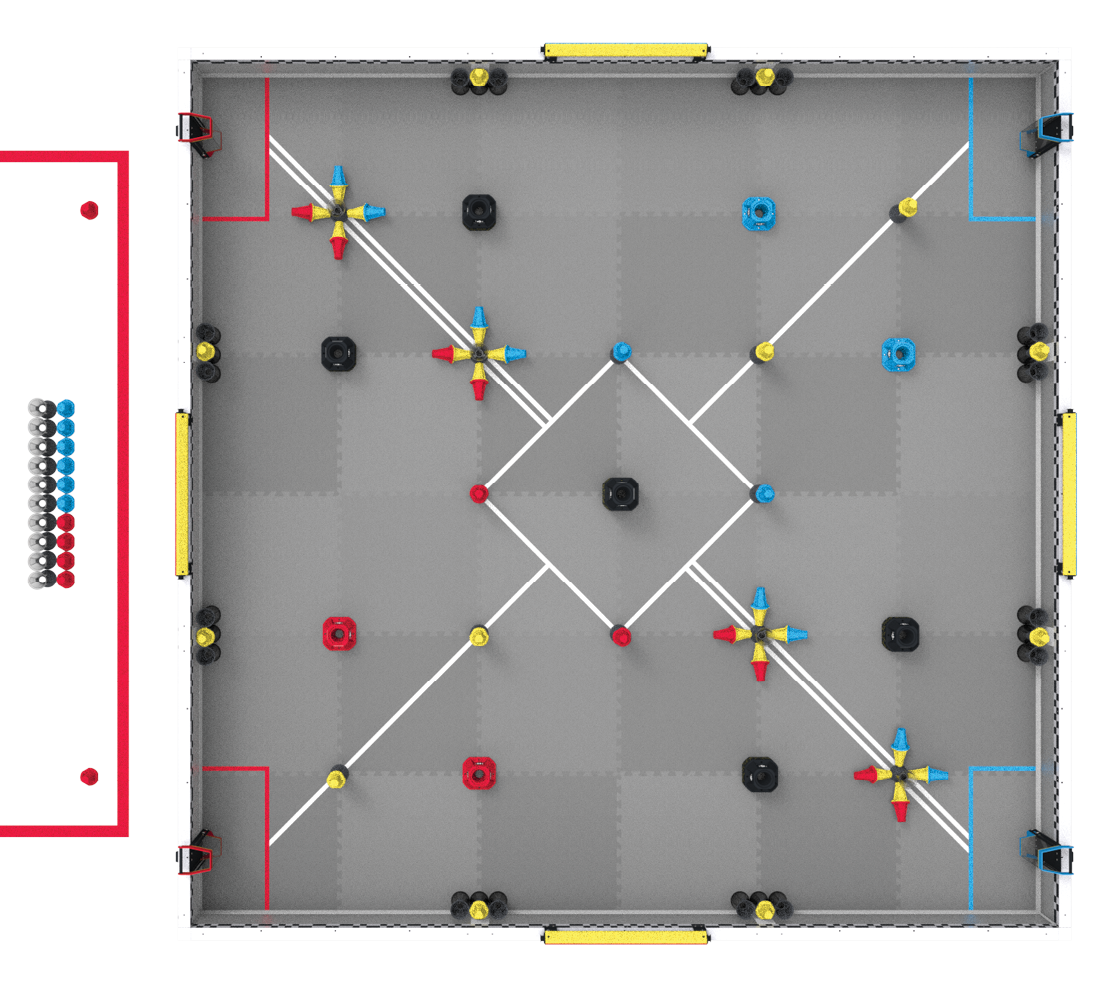
Figure VURS1: The Field setup for a VEX U Robot Skills Match.
Rule Modifications: Tournament
<VUT1> Instead of a 2-Team Alliance format, VURC Head-to-Head Matches will be played 1-Team vs. 1-Team. Each Team will use two (2) Robots in each Match.
- Teams are allowed to build and bring as many Robots as they would like, but only two (2)—one of each size as described in <VUR1> —may be brought from the pit to the playing Field for any Match.
- All Robots must pass inspection before they are allowed to compete.
<VUT2> Qualification Matches will be conducted in the same manner as in a V5RC tournament, but in the revised 1v1 format described in <VUT1>.
<VUT3> Elimination Matches will be conducted in the same manner as in a V5RC tournament, but without an Alliance Selection. At the end of the competition, one Team will emerge as the Tournament champion.
<VUT4> The Autonomous Period at the beginning of each Head-to-Head Match will be 30 seconds.
- Human interaction with Robots during the Autonomous Period is strictly prohibited.
- If both Teams complete their routines before 30 seconds have elapsed, they have the option to signal that they wish to end the Autonomous Period early. Both Teams and the Head Referee must all agree on the “early stop.” This is not a requirement, and the option must have been established for all Teams at the event, such as during the event meeting.
<VUT5> The Driver Controlled Period is shortened to 90 seconds and immediately follows the Autonomous Period.
<VUT6> VEX U Student eligibility.
- All VEX U Team members MUST be matriculated in a post-secondary school OR have earned a post-secondary education diploma, certificate, or other equivalent during the six (6) months preceding the VEX Robotics World Championship. The intent of this rule is to permit VEX U Students graduating mid-year to still be able to finish their competition season.
- Professionals not enrolled in post-secondary education are not eligible to participate on a VEX U Team.
- Students who are dual-enrolled in both a secondary school and in post-secondary courses are not eligible to participate on a VEX U Team.
- VEX U Students may only be on exactly one (1) VEX U Team for the season. See <G5>.
- If at least one member of a VEX U Robotics Team is aged 18 or older, rule <S2> does not apply.
<VUT7> VURC tournaments have fewer Teams in Eliminations. The number of Teams in Elimination Matches for a given event is determined as follows, except in extraordinary circumstances with the permission of VEX Robotics. A number of Teams below 16 will result in one or more Byes for highest-ranking Teams.
Rule Modifications: Robot
<VUR1> Teams may use two (2) Robots in each Match.
- Both Robots may only be built from the following materials:
- Official VEX Robotics products (see <VUR2> )
- Fabricated Parts made by the Team (see <VUR3> through <VUR7> )
- Commercially-available springs, fasteners, and bearings (see <VUR8>, <VUR9>, and <VUR15> )
- A legal electronics system (see <VUR10> and <VUR11> )
- Any legal Additional Electronics (see <VUR12> )
- A legal pneumatics system (see <VUR14> )
- Unmodified legal Raw Stock (see <VUR4> and <VUR5> )
- One Robot must be no larger than 24” (609.6 mm) x 24” (609.6 mm) x 24” (609.6 mm) at the start of the Match.
- One Robot must be no larger than 15” (381 mm) x 15” (381 mm) x 15” (381 mm) at the start of the Match.
<VUR2> Teams may use any official VEX Robotics products, other than the exceptions listed in the tables below, to construct their Robot. This includes those from the VEXpro, VEX EXP, VEX IQ, VEX GO, VEX 123, VEX CTE, and VEX Robotics by HEXBUG* product lines. Rule <R28> applies, but most modifications to non-electrical components are allowed.
This rule takes precedence over all other rules regarding Raw Stock and/or Fabricated Parts, such as <VUR5>.
* The HEXBUG brand is a registered trademark belonging to Spin Master CorpSKU |
Description |
217-8080 |
Talon SRX |
217-9191 |
Victor SPX |
217-9090 |
Victor SP |
217-4243 |
Pneumatic Control Module |
217-4244 |
Power Distribution Panel |
217-4245 |
Voltage Regulator Module |
217-4347 |
775pro |
217-2000 |
CIM Motor |
217-3371 |
Mini CIM Motor |
217-3351 |
BAG Motor |
217-6515 |
Falcon 500 |
<VUR3> Fabricated Parts may be made by applying the following manufacturing processes to legal Raw Stock :
- Additive manufacturing processes, such as 3D printing.
- Subtractive manufacturing processes, such as cutting, drilling, routing, or machining.
- Bending, such as sheet metal braking or thermoforming.
- Attaching materials to one another, such as welding or chemically bonding (e.g., epoxy).
- Molding of non-metals, such as injecting polyurethane into a 3D printed mold.
<VUR4> Fabricated Parts must be made from legal Raw Stock. To be considered Raw Stock, the material must be obtained in one of the following forms before undergoing the fabrication processes listed in <VUR3> :
Type |
Shape / Profile |
Examples |
|
1 |
Sheet |
Flat Plane |
|
2 |
Solid Billet |
“Thick” rectangular beam / block |
|
3 |
Solid Bar |
“Thin” rectangular beam |
|
4 |
Hollow Bar |
Hollow rectangular beam |
|
5 |
Solid Rod |
Cylinder, Hexagonal or Rounded Hexagonal Stock |
|
6 |
Hollow Rod / Tube |
Hollow Cylinder, Drilled/Threaded Hexagonal or Rounded Hexagonal Stock |
|
7 |
Angle |
90° “L” shape |
|
8 |
U- / C-Channel |
“U” or “C”. |
|
9 |
Non-Metal 3D Printer Filament |
Thin cylinder |
|
10 |
Synthetic Polymer used for Molding |
Liquid |
|
11 |
Solid Sphere |
Solid (not hollow) uniformly rounded stock |
|
<VUR5> The following material types are not considered Raw Stock, and are therefore not permitted:
Type |
Examples |
|
1 |
Any otherwise-legal Raw Stock that has been post-processed by drilling, machining, or otherwise removing material |
|
2 |
Extrusions that do not fall under one of the categories listed in <VUR4> |
|
3 |
Assembled items (or pre-arranged kits of unassembled items) that form a single, more complex component |
|
4 |
Commercial Off-the-Shelf items that are intended to be used with minimal modification |
|
5 |
Materials that are intended to be cast or sintered |
|
Note: <VUR2> takes precedence over this rule. Materials purchased from VEX Robotics that fall under one of these categories (e.g., VersaFrame pre-drilled extrusion) are permitted.
In industry, terms like “raw stock,” “raw material,” and “material stock” are often used interchangeably and cover an extremely broad scope of physical goods. The lists in <VUR4> and <VUR5> are intended to explain what specific material types and profiles fall under the defined term “Raw Stock” in the context of the VEX U competition.
<VUR6> Fabricated Parts cannot be made from Raw Stock which poses a safety or damage risk to the event, other Teams, or Field Elements. Examples of prohibited materials include, but are not limited to:
- Any material intended to produce flames or pyrotechnic effects.
- Any material that is liquid at the time of the Match. Examples include hydraulic fluids, oils, greases, liquid mercury, and tire sealant.
- This does not include fabrication processes that involve the use of liquids, such as milling coolant or epoxy.
- Any matter that shatters or otherwise presents an excessive Field /safety hazard upon failure. Examples include fiberglass, acrylic, and carbon fiber sheet/tube stock.
- This rule refers specifically to material legality itself. Any potentially unsafe mechanisms made from legal Raw Stock may still be addressed by <S1> and <R19>.
- 3D printer filaments that include carbon fiber (or similar) additives or carbon fiber (or similar) inlay are exempt from this exception, and are considered legal for use in Fabricated Parts.
<VUR7> Fabricated Parts must be made by Team members. Any Fabricated Parts must be accompanied by documentation that demonstrates the Team’s design and construction process for that Fabricated Part.
- The minimum acceptable form of documentation is an engineering drawing with multiple views for the part in question. These drawings may be included in a Team’s Engineering Notebook or in a standalone appendix to the Engineering Notebook.
- Any Fabricated Part must have been entirely designed and produced by Team members. For example, parts ordered by the Team and 3D printed by a third party would be prohibited.
- Teams will be required to provide this documentation as requested by inspectors, Head Referees, or judges at any time at an event. Failure to provide acceptable documentation will result in the part being deemed illegal for use; therefore, <R2>, <G6>, and/or <G1> will apply.
<VUR8> Teams may use commercially-available springs on their Robots. For the purposes of this rule, a “spring” is any device used for storing and releasing elastic potential energy. Examples include, but are not limited to:
- Compression, tension, torsion, constant force, or conical springs made from spring steel.
- Springs made from elastic thread or rubber, such as surgical tubing, bungee cords, or stretchable braided rope.
- Closed-loop (pneumatic) gas shocks.
Note: Gas shocks are not considered pneumatic devices in the context of <VUR14>. Gas shocks may not be modified in any way.>
<VUR9> Teams may use commercially available fastener hardware on their Robot. Examples include (but are not limited to):
- Screws, nuts, rivets, and heatset inserts
- Hinges, pins, rod ends, threaded rods, and hose clamps
- Ancillary fastener accessories, such as washers or spacers
- Adhesives such as epoxy, glue, or tape (only when used to join together two parts)
If the primary function of the part is not “fastening”, then <VUR5>, <VUR6>, and/or <VUR7> take precedence over this rule. Illegal examples include (but are not limited to):
- A prefabricated non-VEX wheel, even though it may technically connect tread to a shaft
- 80/20 extrusion; other items get “fastened to it”, it is not the part doing the “fastening”
- Using grip tape to improve wheel traction
<VUR10> Each Robot must utilize exactly one (1) V5 Robot Brain and at least one (1) V5 Robot Radio connected to a V5 Controller.
- Teams must abide by the power rules noted in <R12> and <VUR12d>.
- Wireless communication between Robots is permitted if using legal V5 Robot Brains and V5 Robot Radios. No other types of wireless communication protocols (e.g., radio, Bluetooth, Wi-Fi) are permitted.
<VUR11> There is no restriction on the number of V5 Smart Motors, 11W (276-4840) and/or 5.5W (276-4842) that Robots may use. No other motors, servos, or electronic actuators are permitted, including those sold by VEX (e.g., the 2-Wire 393 Motor).
Note 1: Rule <R28> still applies in VEX U. Teams may not modify Smart Motors, and must use official/unmodified gear cartridges.
Note 2: Commercially available pneumatic actuators and pneumatic solenoids are permitted within the guidelines of <VUR14>.
Note 3: Legal Additional Electronics may include their own motor, servo, or actuator, per <VUR12>.
Note 4: The 55W drivetrain limit specified in <R11> does not apply for VEX U.
<VUR12> There is no restriction on commercially available Sensors, External Processors, or Additional Electronics that Robots may use for sensing and processing, except as follows:
- Sensors and External Processors MUST be connected to the V5 Robot Brain via any of the externally accessible ports (i.e., without any modification to the commercially available electronics). A Sensor may be connected to an External Processor which then connects to the V5 Robot Brain.
- Sensors, External Processors, and Additional Electronics CANNOT directly electrically interface with VEX motors and/or solenoids.
- Sensors and Additional Electronics may only receive power from any of the following:
- Directly from the V5 Robot Brain via any externally accessible port.
- From an additional lithium ion, lithium iron, or nickel metal hydride battery pack (only one (1) additional battery can be used for Sensor/processing power). This additional battery pack must operate at a maximum of less than 13 volts.
- Directly from an External Processor
- Only the V5 Battery can power the V5 Brain.
- Sensors, External Processors, and/or Additional Electronics which include a low-powered motor as an integral part of their primary sensing/processing function, such as an External Processor’s cooling fan or a spinning Sensor, are permissible.
- Standalone motors which serve no additional sensing or processing functionality (e.g., using a commercially-available brushless motor in a drivetrain) are not considered legal Additional Electronics, and would be considered a Violation of <VUR11>.
- Pneumatic solenoids are the only types of solenoids that are permitted as Additional Electronics. Solenoids used for any purpose other than opening and closing a pneumatic valve are considered an actuator and therefore prohibited, per <VUR11>.
- <R28> still applies in VEX U, Teams may not alter or modify electronic parts from the VEX product lines. It is legal to rotate the blocks of the V5 Optical Sensor and V5 Distance Sensor relative to their bases, and to manufacture custom back plates for these sensors.
<VUR13> Commercially available Electromechanical Assemblies are not legal for use on Robots.
- For the purposes of this rule, any system that integrates Sensors with other mechanical parts that are fabricated by anyone other than Team members and which serve more use than the basic definition of a Sensor would be considered an Electromechanical Assembly, and is therefore not legal.
- Examples may include but are not limited to: odometry pods.
- Commercially available Sensors with simple plastic housings that do not have any use beyond protecting internal components and aiding in mounting of the Sensor are not considered Electromechanical Assemblies.
The intent of this rule is to remind Teams to focus their efforts on integrating custom parts with the VEX Robotics ecosystem. The VEX U Competition operates within a semi-closed system, not an open-build system. Teams should make efforts to use VEX Robotics parts where possible. Parts like additional Sensors (LIDAR, encoders, etc.) should generally be considered okay, but assemblies/systems from other robotics suppliers that remove the challenge of systems integration should not be considered a legal part.
<VUR14> Teams may utilize an unlimited amount of the following commercially available pneumatic components: cylinders, actuators, valves, gauges, storage tanks, regulators, manifolds, tubing, and solenoids.
- Pneumatic devices may only be charged to a maximum of 100 psi.
- Compressors or any other forms of “on-Robot ” charging are not permitted.
- All commercial components must be rated for 100 psi or higher. Teams should be prepared to provide documentation that verifies these ratings to inspectors if requested.
- Components must not be modified from their original state, other than the following exceptions:
- Cutting pneumatic tubing or wiring to length; assembling components using pre-existing threads, brackets, or fittings; or minor cosmetic labels
- If commercially available 12V solenoids are used, these are considered Additional Electronics and must therefore satisfy all conditions listed in <VUR12>. 12V solenoids may be either powered by an additional power source (per <VUR12d>), or by a 5V-12V step-up converter from the V5 Robot Brain. If an external power source (or other Additional Electronics device) is used to interface with the solenoid, Teams MUST be able to demonstrate that there is no way for the solenoid to receive power while the Robot is receiving a Disabled state from the field controller.
<VUR15> Teams may use commercially available bearings on their Robot. For the purpose of this rule, a ‘bearing’ is a part that supports external loads, reduces friction, and improves efficiency by facilitating smooth dynamic motion between components. Legal examples include (but are not limited to):
- Parts supporting rotational motion: radial bearings, roller bearings, thrust bearings, needle bearings, one-way bearings, bushings, etc.
- Parts supporting linear motion: linear bearings, linear slides, drawer slides, etc.
Team Composition
We want to see Universities face off in a global head-to-head competition. Schools are not limited to one Team, and a Team may consist of multiple colleges, but we hope that each Team identifies with and proudly represents one (1) post-secondary institution. (e.g., “Clarkson University” vs. “UC Santa Barbara”). Of course, college-level “club” Teams and mixed composition Teams are encouraged to join! However, as noted in <VUT7>, Students who have not yet graduated secondary school are not eligible to participate in VEX U, even if they are “dual-enrolled” or taking post-secondary courses. A Student cannot be a member of a V5RC and a VURC Team simultaneously, regardless of eligibility.
Appendix A - Field Overview
Game Field Introduction
This document will provide Bill of Materials (BOM) information and detailed specifications for the Official Competition Field.
Please note: this Field can utilize both the VEX Portable Competition Field Perimeter (276-8242 and the VEX Competition Field Perimeter (278-1501) developed by VEX Robotics. Instructions and specifications for these Field Perimeters are available in separate documents and are important for the Field assembly.
This document is divided up into three sections:
There is also an accompanying STEP file which can be imported into most 3D modeling programs (e.g., Inventor, Sketchup, Solidworks, etc.). This 3D model shows the “official” setup of a VEX V5 Robotics Competition Override competition Field, as well as detailed models of individual Field Elements. For additional game-play detail, please refer to the VEX V5 Robotics Competition Override Game Manual.
Field Overview
V5RC Override is played on a 12ft x 12ft foam mat, surrounded by a Field Perimeter, with nine (9) Goals, four (4) Loaders, and four (4) Toggles on the Field.
The V5RC Override Field consists of fifty-six (56) Cups and sixty-three (63) Pins.
For more details and specific gameplay rules, please refer to the V5RC Override Game Manual.
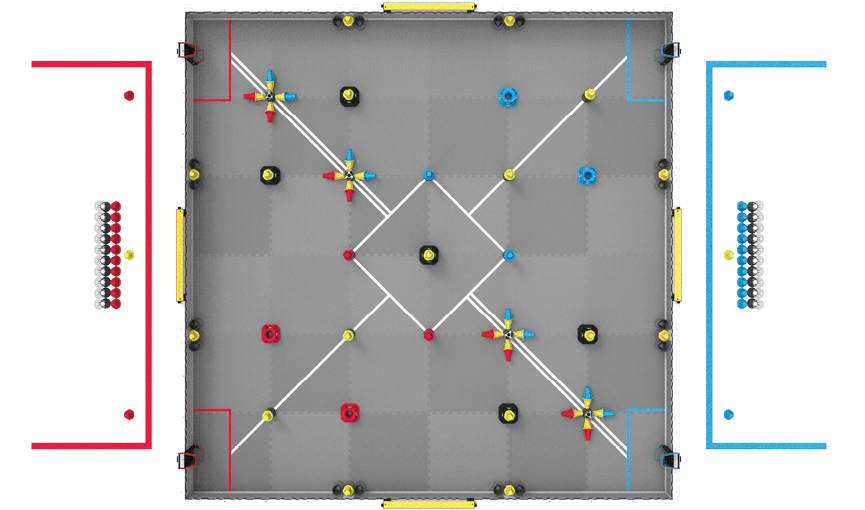
Game Objects & Field Bill of Materials
All of these items are available for purchase from www.vexrobotics.com
Generic Field Elements - Reusable Each Year
Part Number |
Description |
278-1501 |
Field Perimeter Frame & Hardware |
276-8242 |
Portable Competition Field Perimeter |
276-6905 |
Anti-Static Field Tiles (18-Pack) |
276-7741 |
Smart Field Controller Kit |
Official VEX V5 Robotics Competition Override Specific Elements
Part Number |
Description |
Quantity per Full Field |
276-9250 |
V5RC 2026-27 Full Field & Game Element Kit |
|
276-9251 |
V5RC 2026-27 Game Element Kit |
1 |
276-9252 |
V5RC 2026-27 Field Element Kit 1 |
1 |
276-9091 |
V5RC Field Element Plates (4-Pack)* |
2 |
Practice Elements
Part Number |
Description |
276-9255 |
V5RC 2026-27 Scoring Element Kit |
Field Specifications Introduction
This section will outline the specifications that are most important to Teams designing a Robot to compete in VEX V5 Robotics Competition Override. Though many of the critical dimensions are included in this section, it may be necessary to consult the separate assembly guide and 3D CAD models of the Field for an additional level of detail. If you can’t find a dimension in the specifications, we include a full model of the Field to “virtually” measure whatever dimension is necessary.
Field components may vary slightly from event to event. This is to be expected; Teams will need to adapt accordingly. It is good design practice to create mechanisms capable of accommodating variances in the Field and Scoring Objects.
Note: Minor Field repairs are permissible, provided that the repairs do not affect gameplay. Examples of minor Field repairs include (but are not limited to) threadlocker applied to Field Element mounting hardware. Be sure to check the Official Q&A for specific examples or to get an official clarification.
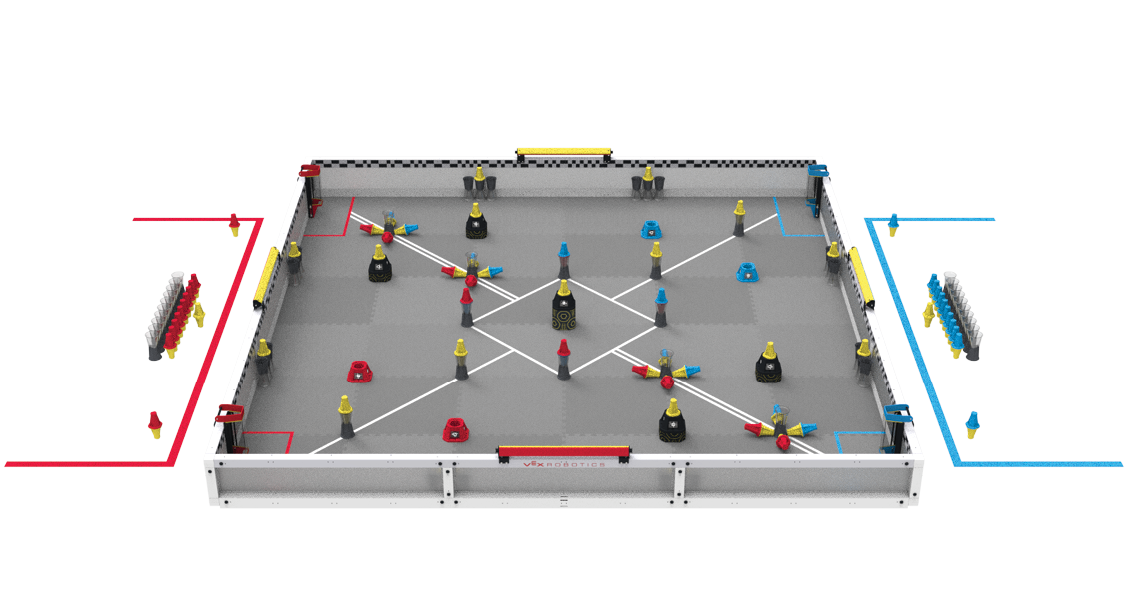
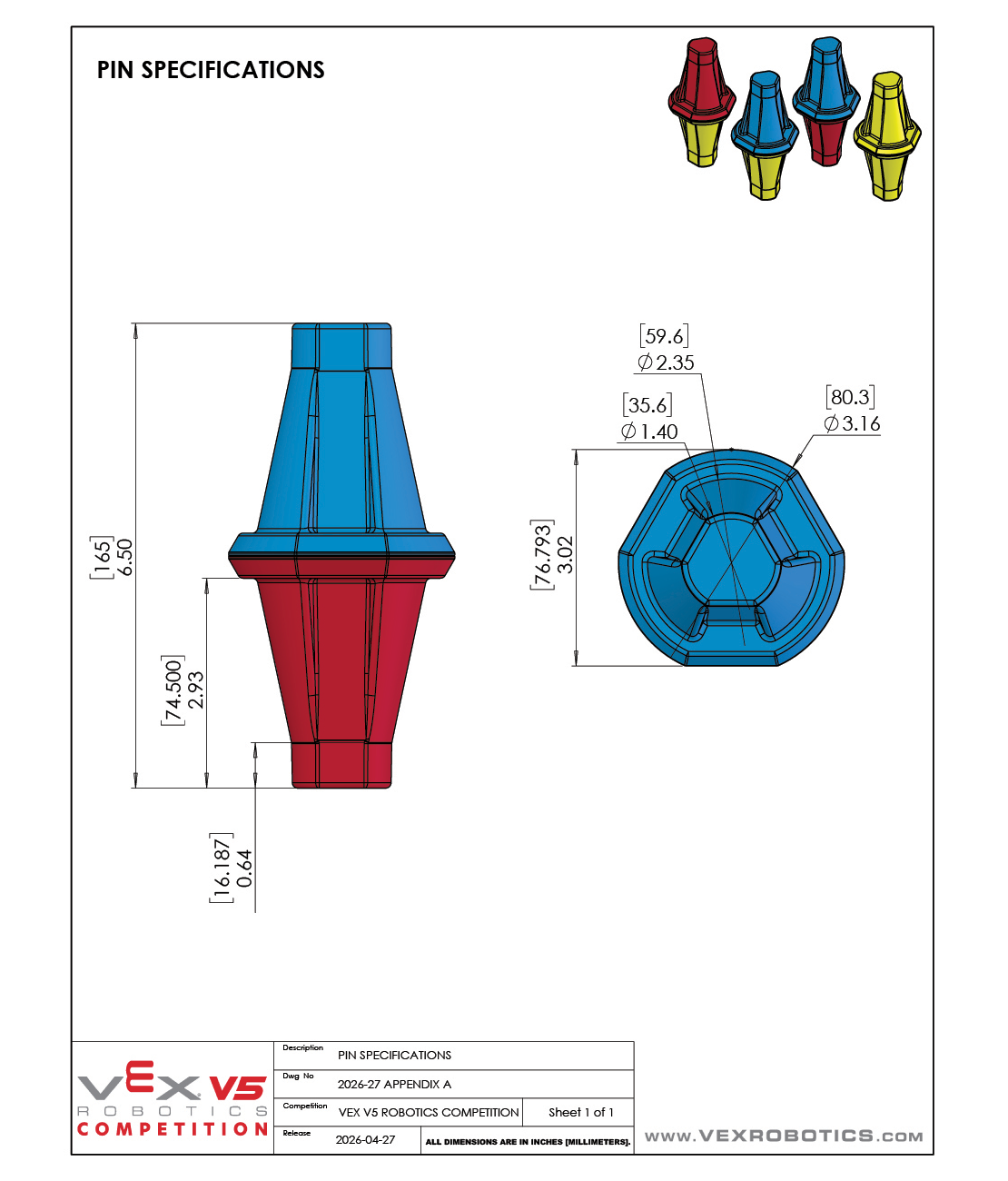
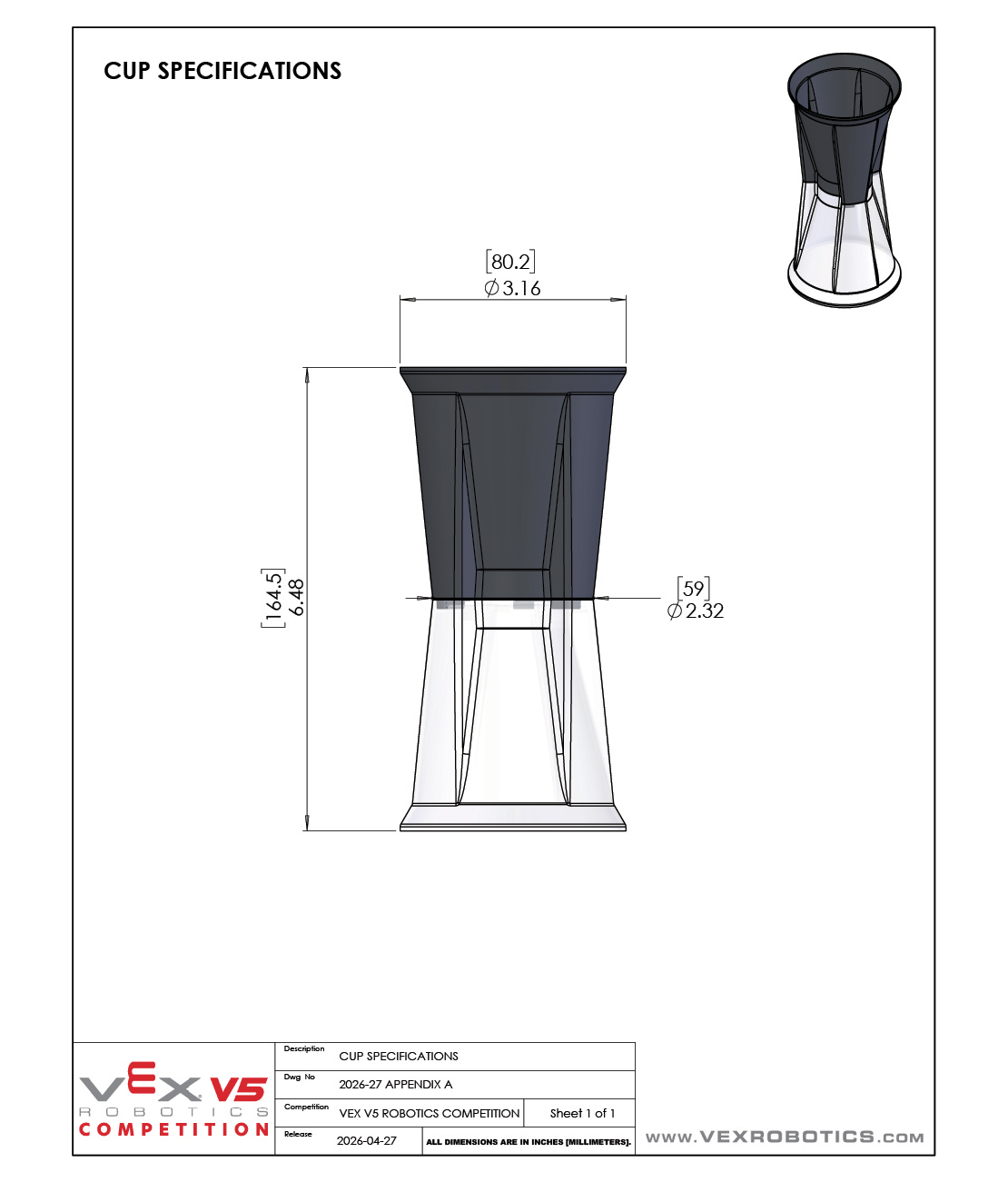
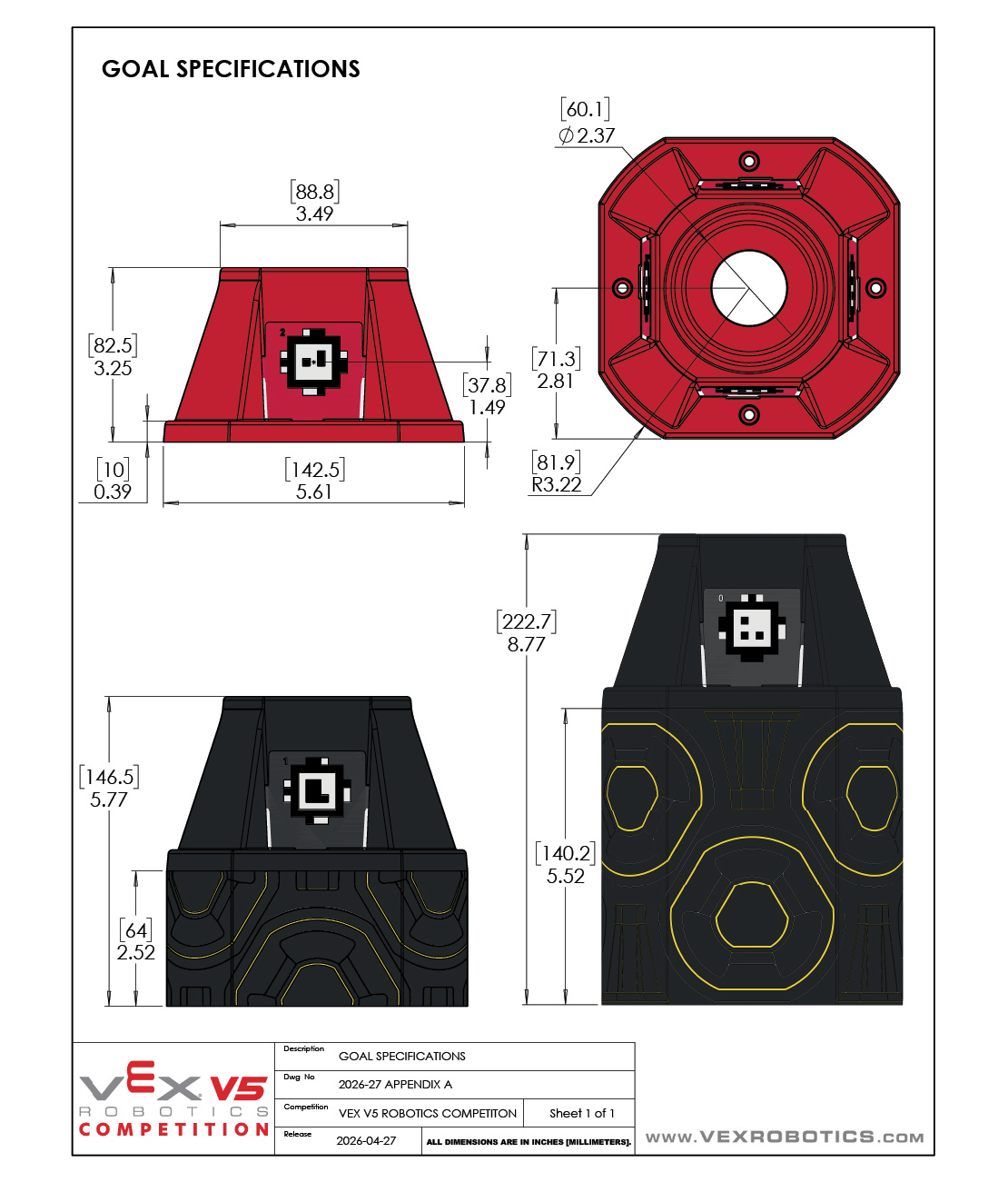
![Engineering specification drawing for the VEX V5 Robotics Competition toggle. All dimensions are in inches with millimeters in brackets. The top view shows a rounded-triangular paddle with a central three-spoke hub. Its dimensions are 2.03 in [51.6 mm] across with a 1.19 in [30.2 mm] inner reference. The lower view shows the full toggle bar (a yellow and red bar) mounted on top of a checkered field perimeter wall. The toggle bar spans 25.99 in [660.2 mm], and the field wall height shown is 13.20 in [335.3 mm].](https://content.vexrobotics.com/docs/2026-2027/override/online-manual/assets/image/ToggleSpecs.png)
![Engineering specification drawing for the VEX V5 Robotics Competition loader. All dimensions are in inches with millimeters in brackets. Small isometric renders in the top corner show two loaders, one red and one blue. The top view shows a circular opening with diameter 3.39 in [86 mm] within a 3.74 in [95 mm] frame. The front view shows the loader as a tall chute mounted over the field wall, with overall height 14.37 in [365 mm] and a lower mounted section of 3.25 in [82.5 mm]. The side view gives an overall height of 22.97 in [583.5 mm], a lower reference of 11.85 in [301 mm], and a base width of 4.02 in [102.1 mm].](https://content.vexrobotics.com/docs/2026-2027/override/online-manual/assets/image/LoaderSpecs.png)
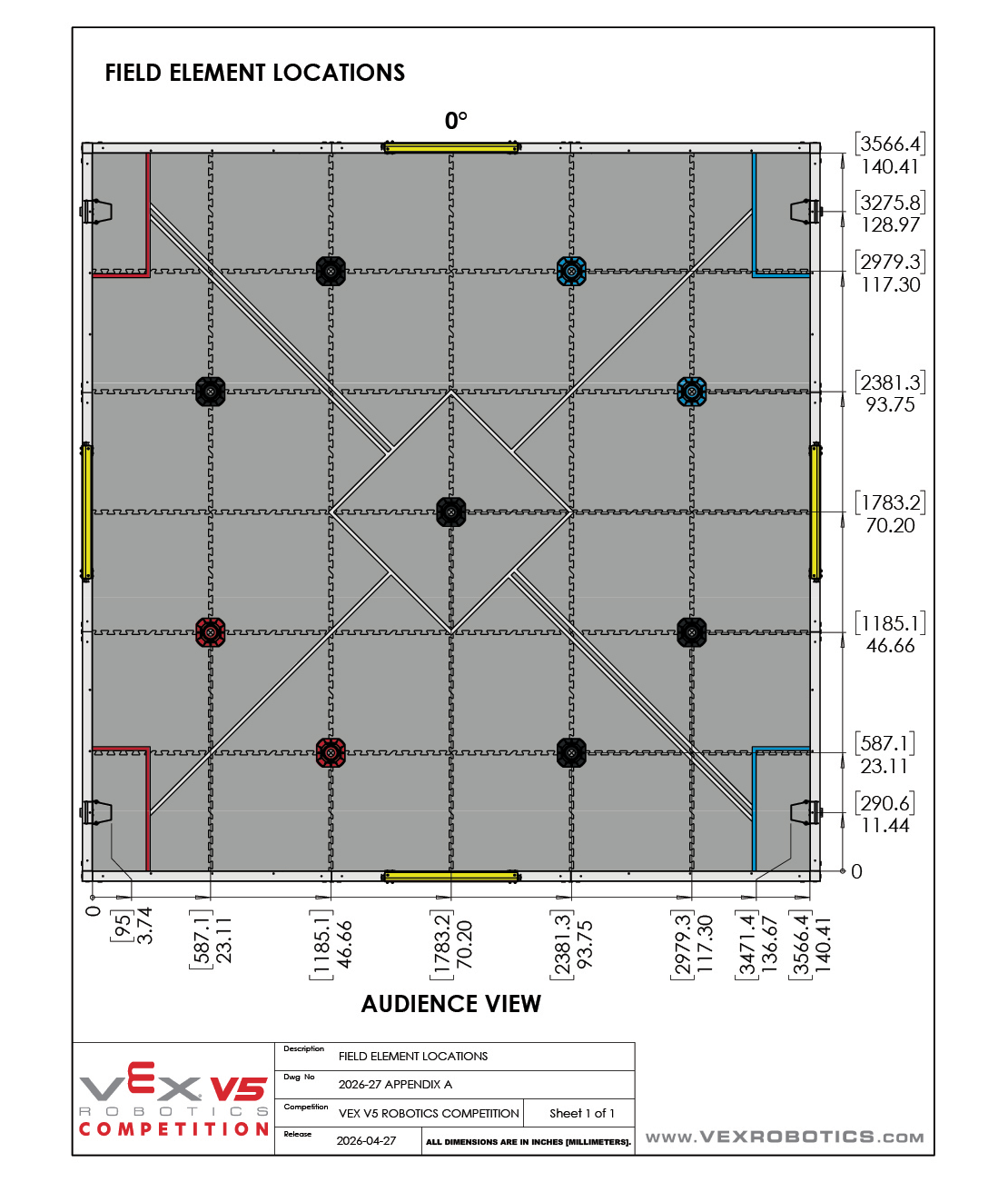
![Specification drawing for the VEX V5 Robotics Competition field tape lines. All dimensions are in inches with millimeters in brackets. Three circular detail views run across the top. The first, Autonomous Line, shows the tape width of 2.50 in [63.5 mm]. The second, Midfield, shows that the center of the tape line aligns with the center point where four tiles meet. The third, Load Zone, shows the outside tape edge at the center of a tile and the inside tape edge running along the outside edge of the tile teeth. Below is a top-down field diagram (labeled 0° and Audience View) showing the full tape-line layout, with callout markers A, B, and C indicating where each detail view applies. The diagonal tape segment is dimensioned at 34.05 in [864.8 mm].](https://content.vexrobotics.com/docs/2026-2027/override/online-manual/assets/image/TapeLineSpecs.png)
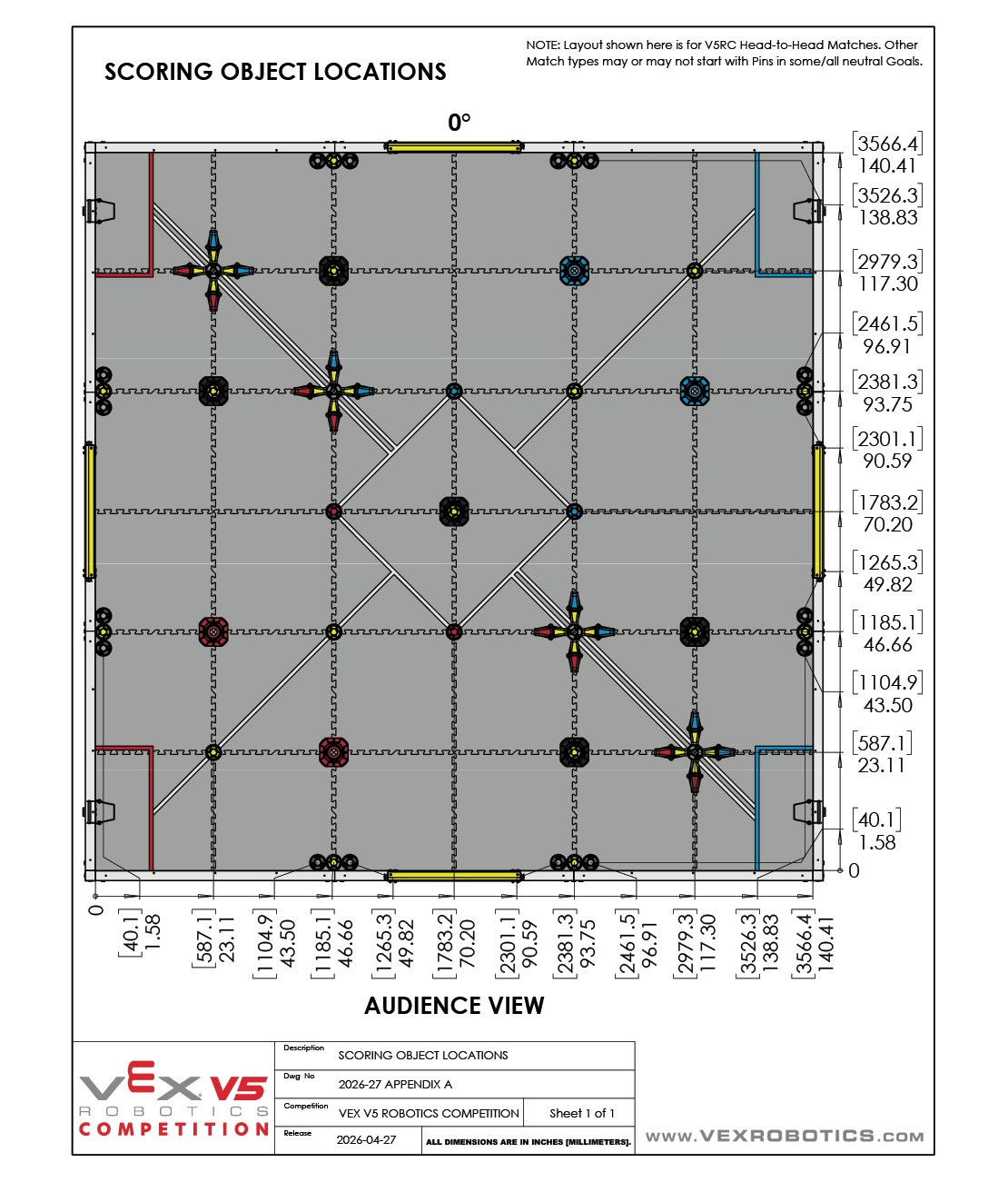
![Specification drawing for the VEX V5 Robotics Competition portable (plastic) field perimeter. All dimensions are in inches with millimeters in brackets. The top-down view shows the square tiled field, dimensioned inside-wall-to-wall as 140.4 in [3566.4 mm] in both directions. A wall cross-section labeled Section A-A gives a wall width of 2.00 in [50.8 mm] and a wall height of 11.54 in [293 mm]. A Field Critical Dimensions summary lists: approximately 140.40 inch square wall-to-wall inside, 11.54 inch wall height, and 2.00 inch wall thickness. A note states that some events not using anti-static field tiles may elect to use Techspray 1726-QT, or a suitable replacement, to prevent static buildup on the foam tiles.](https://content.vexrobotics.com/docs/2026-2027/override/online-manual/assets/image/PortableFieldSpecs.png)
![Specification drawing for the VEX V5 Robotics Competition metal field perimeter. All dimensions are in inches with millimeters in brackets. The top-down view shows the square tiled field, dimensioned inside-wall-to-wall as 140.50 in [3568.7 mm] in both directions. A wall cross-section gives a wall width of 1.27 in [32.4 mm] and a wall height of 11.50 in [292.1 mm]. A Field Critical Dimensions summary lists: approximately 140.5 inch square wall-to-wall inside, 11.5 inch wall height, and 1.27 inch wall thickness. A note states that some events not using anti-static field tiles may elect to use Techspray 1726-QT, or a suitable replacement, to prevent static buildup on the foam tiles.](https://content.vexrobotics.com/docs/2026-2027/override/online-manual/assets/image/MetalFieldSpecs.png)
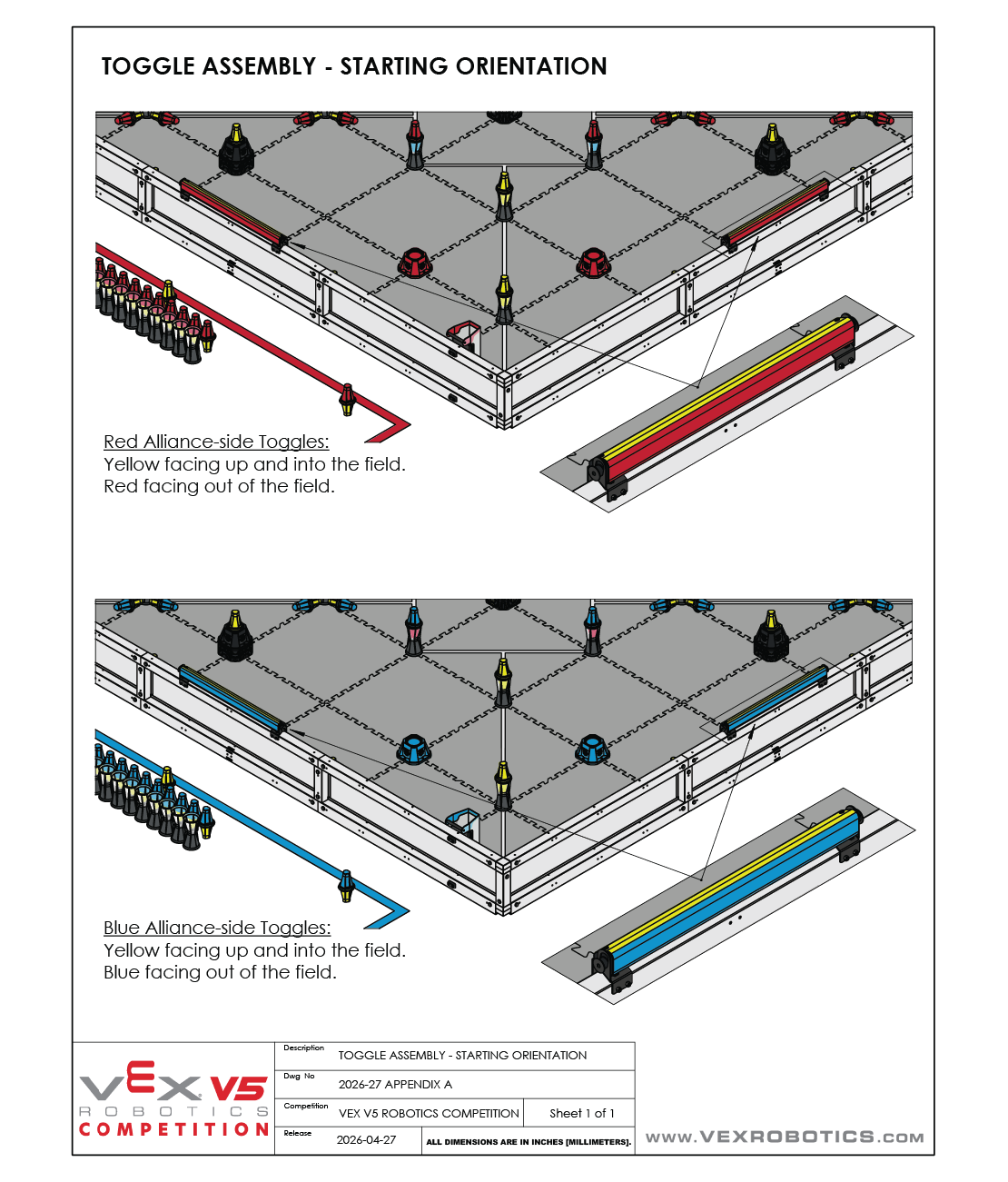
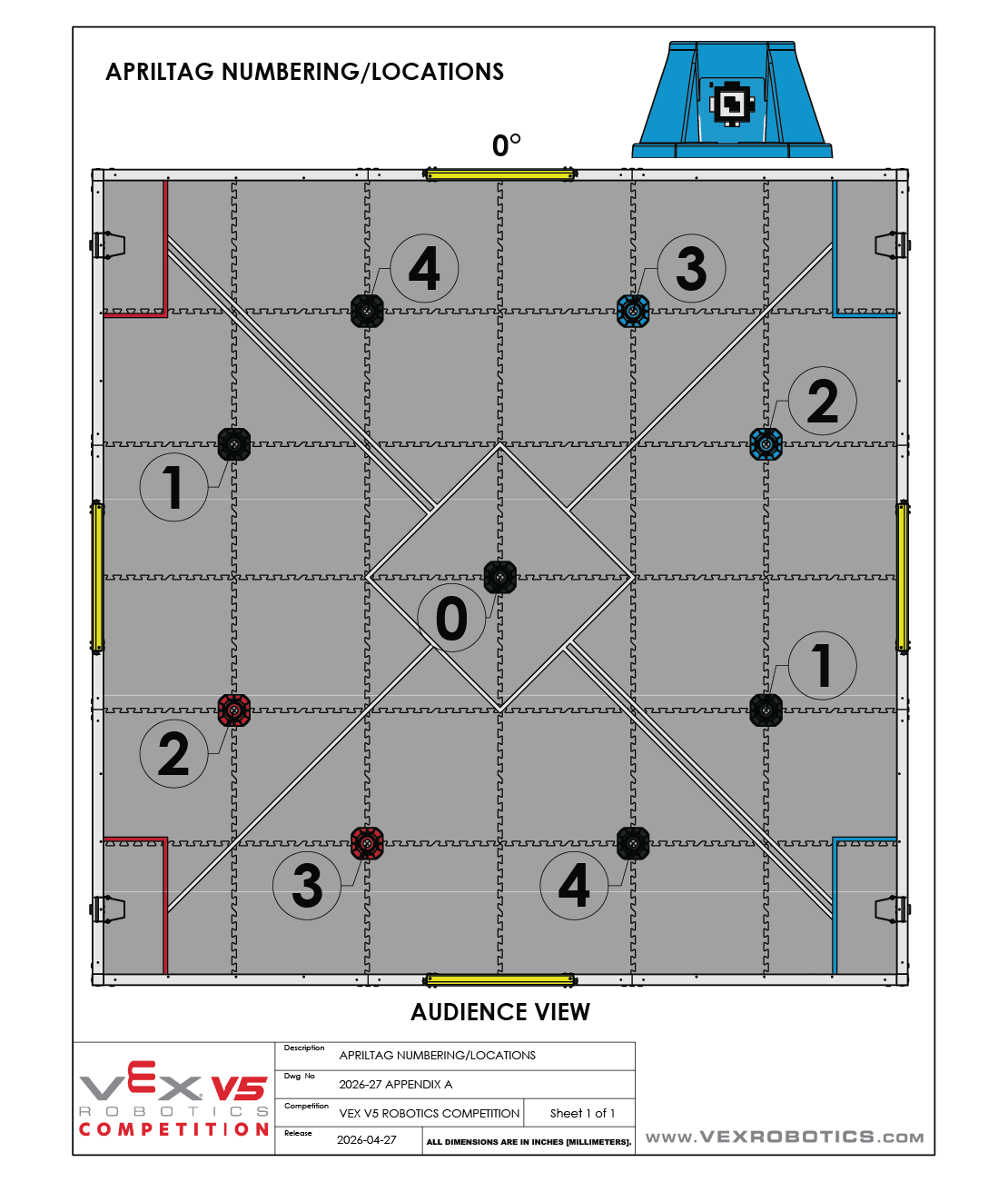
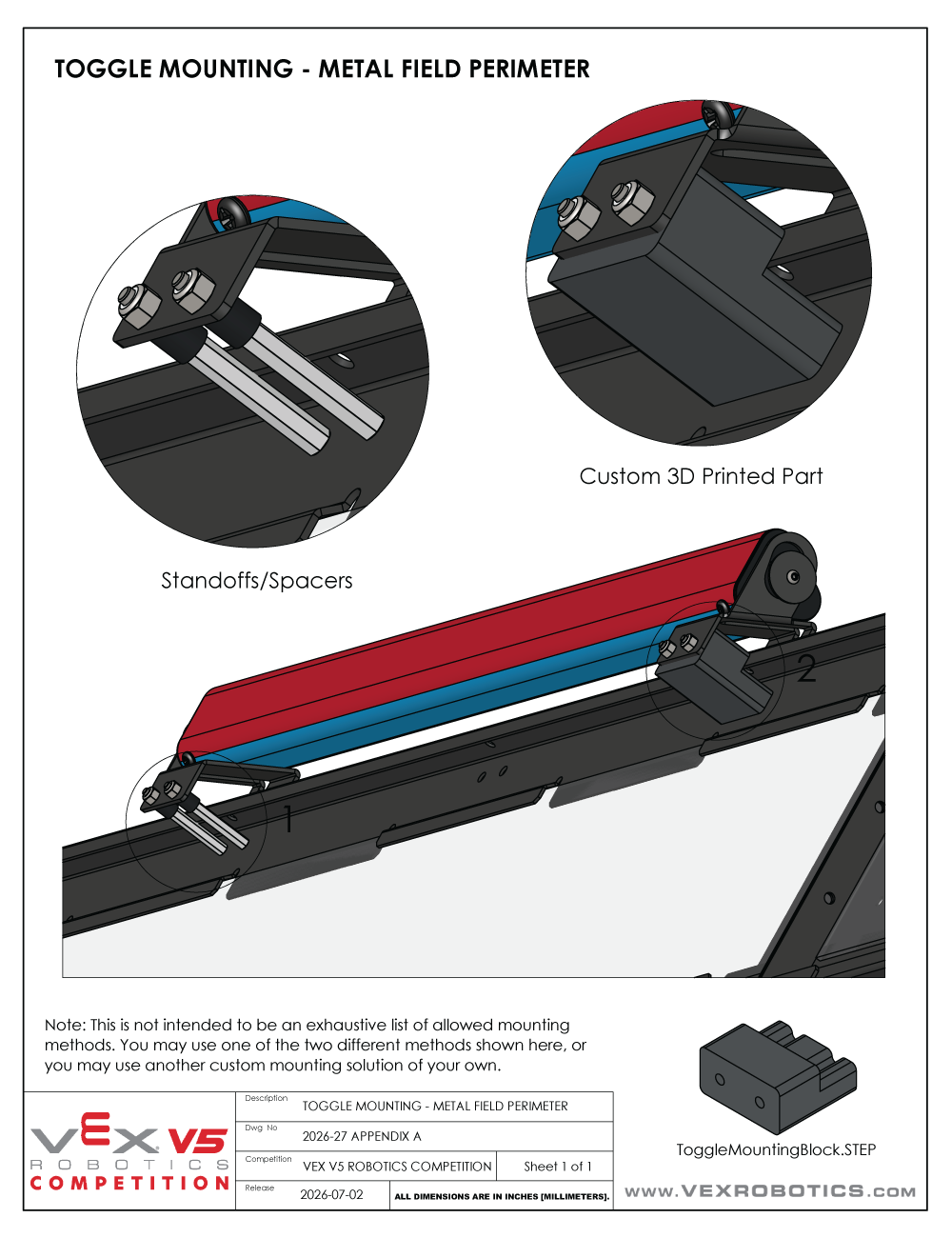
Appendix B - Glossary of Terms
Adult - Anyone who is not a Student or another defined term (e.g., Head Referee ).
Alliance - A pre-assigned grouping of two Robots that are paired together during a given Head-to-Head Match.
Alliance Captain - One of the Teams with the privilege of inviting another available Team to form an Alliance for Elimination Matches. See <T16>.
Alliance Selection - The process of choosing the permanent Alliances for Elimination Matches. The Alliance Selection proceeds as follows:
- The highest-ranked Team at the end of Qualification Matches becomes the first Alliance Captain.
- The Alliance Captain invites another Team to join their Alliance.
- The invited Team representative either accepts or declines as outlined in <T16>.
- The next-highest-ranked Team becomes the next Alliance Captain.
- Alliance Captains continue to select their Alliances in this order until all Alliances are formed for Elimination Matches.
Alliance Station - The designated regions where the Drive Team Members must remain for the duration of the Match.
Autonomous Bonus - A point bonus awarded to the Alliance that has earned the most points at the end of the Autonomous Period. See <SC7> for more information.
Autonomous Coding Skills Match - see Match.
Autonomous Line - The pair of white tape lines that run diagonally across the Field and around the Midfield, and the space between those lines. See <SG7> for more information.
Autonomous Period - A time period during which Robots operate and react only to sensor inputs and pre-programmed commands.
Autonomous Points (AP) - The second basis of ranking Teams. An Alliance who wins the Autonomous Bonus during a Qualification Match earns ten (10) Autonomous Points. In the event of a tie, both Alliances will receive five (5) Autonomous Points.
Autonomous Win Point (AWP) - An additional Win Point awarded to any Alliance that has completed a defined set of tasks at the end of the Autonomous Period of a Qualification Match. Both Alliances can earn an Autonomous Win Point if both Alliances accomplish these tasks. See <SC7> for more information.
Builder - Any Student Team member who helps build the Robot. Adults are permitted to teach Builders associated concepts, but should never work on the Robot.
Bye - A situation in which an Alliance automatically advances to the next round of Tournament play without competing.
Coder - Any Student Team member who contributes to the computer code that is downloaded onto the Robot. Adults are permitted to teach Coders associated concepts, but should never work on the code that goes on the Robot.
Cup - A Scoring Object, measuring approximately 3.15” (80mm) in diameter and 6.5” (164.5mm) tall. Each Cup consists of two halves: one transparent and one opaque.

Figure C-1: A Cup
Defensive - A category of strategies, Robot actions, and/or Robot statuses that can be employed by a Team during a Match ; see rules <GG14> and <GG15> for more information. A Robot is Defensive while it is engaged in actions that cannot increase its Alliance’s score for the current Match, and instead limits an opponent’s ability to score or play the game. A Robot can be in Possession of a Scoring Object and capable of scoring, but still be Defensive based on its actions. Examples include, but are not limited to:
- De-scoring in a way that doesn’t increase points for the Robot’s own Alliance
- Limiting access to a portion of the Field while not attempting to score
- Holding, blocking, impeding, or otherwise restricting or controlling an opponent’s movements
Remember, Defensive Robot actions or Robot statuses are not automatically Violations. However, Robot actions or statuses that are performed or achieved in a Defensive manner are more likely to be Violations, and Teams should be more careful when employing Defensive strategies.
Designer - Any Student Team member who helps design the Robot to be built for competition. Adults are permitted to teach Designers associated concepts, but should never work on the design of the Robot.
Disablement - A penalty applied to a Team for a safety Violation. A Team that receives a Disablement is not allowed to operate their Robot for the remainder of the Match, and the Drive Team Member (s) will be asked to place their controller(s) on the ground or another safe location outside of the Field, as directed by the Head Referee.
Disqualification - A penalty applied to a Team for a Major Violation (see <GG6> for more details). If a Team receives a Disqualification in a Match, the Head Referee will notify the Team of their Violation at the end of the Match. A Team that receives a Disqualification in a Qualification Match receives zero Win Points, zero Autonomous Win Points, zero Autonomous Points, and zero Strength of Schedule Points. When a Team receives a Disqualification in an Elimination Match, the entire Alliance is Disqualified and they receive a loss for the Match. At the Head Referee’s discretion, repeated Violations and/or Disqualifications for a single Team may lead to its Disqualification for the entire Tournament (see <GG6> ). A Team that receives a Disqualification in a Driving Skills Match or Autonomous Coding Skills Match receives a score of zero for that Robot Skills Match.
Drive Team Member - A Student who stands in the Alliance Station during a Match. Adults are not allowed to be Drive Team Members. See rule <GG1>.
Driver Controlled Period - A time period during which Drive Team Members operate their Robot using a VEX V5 controller.
Driving Skills Match - see Match.
Elimination Bracket - A schedule of Elimination Matches for eight (8) to sixteen (16) Alliances. See <T17>.
Elimination Match - see Match.
Endgame - A time period consisting of the last 10 seconds of a Head-to-Head Match, in which Robots attempt to end the Match in the Midfield. See rule <SG12>.
Entanglement - A Robot status. A Robot is Entangled if it has grabbed, hooked, or attached to an opposing Robot or a Field Element. See rule <GG14>.
Event Partner - The volunteer VEX V5 Robotics Competition Tournament coordinator who serves as an overall manager for the volunteers, venue, event materials, and all other event considerations.
Field - The entire playing Field, comprising the Floor and the Field Perimeter.
Field Element - The Field, white tape, Loaders, Goals, Toggles, and all supporting structures and accessories (such as field monitors, etc.).
Field Perimeter - The outer part of the Field, made up of 12 straight sections.
Floor - The interior flat part of the playing Field, made up of an array of six (6) gray foam field tiles wide by six (6) gray foam field tiles long (totaling 36 Field tiles) that are within the Field Perimeter.
Game Design Committee (GDC) - The creators of Override, and authors of this Game Manual. The Game Design Committee is the only official source for rules clarifications and Q&A responses; see Section 1.
Goal - One of the nine (9) designated locations around the Field in which Robots attempt to score Pins and Cups. Goals are octagonal, and each Goal is one of three colors: red, blue, or black. The center Goal is 8.7” (222.7mm) tall, neutral Goals in Quadrants are 5.8” (146.5mm) tall, and Alliance -specific Goals are 3.25” (82.5mm) tall.
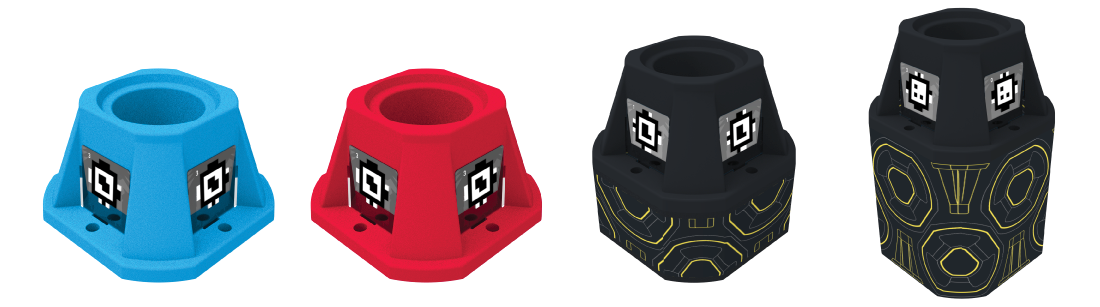
Figure G-1: The four types of Goals in a V5RC Override Match
Head Referee - A certified impartial volunteer responsible for enforcing the rules in this manual as written. Head Referees are the only people who may discuss ruling interpretations or scoring questions with Teams at an event. Large events (e.g., Signature Events, World Championships, etc.) might include multiple Head Referees at the Event Partner’s discretion.
Head-to-Head Match - see Match.
Holding - A Robot status; see rule <GG17> for more information. Holding is legal until it exceeds the limits in <GG17>. A Robot is considered to be Holding if it meets any of the following criteria during a Match :
- Trapping - Limiting the movement of an opponent Robot to a small or confined area of the Field, approximately the size of one foam field tile or less, without an avenue for escape. Note that if a Robot is not attempting to escape, it is not considered Trapped.
- Pinning - Preventing the movement of an opponent Robot through contact with the Field Perimeter, a Field Element, or another Robot.
- Lifting - Controlling an opponent’s movements by raising or tilting the opponent’s Robot off of the Floor. Preventing a Robot that is already off of the Floor from returning to the Floor may also be considered Lifting or Trapping.
Loader - One of the four designated locations (two per Alliance ) around the Field where Drive Team Members can introduce Match Load Pins and Cups. See rule <SG11>.
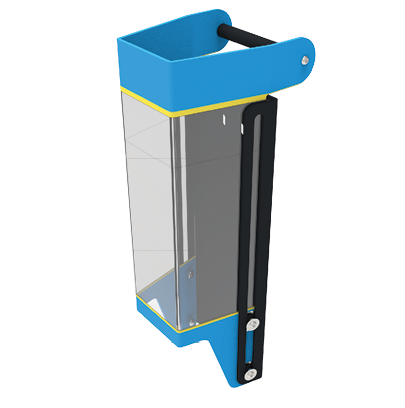
Figure L-1: A Loader
Load Zone - An infinitely tall three-dimensional volume bounded by the inner edges of the Field Perimeter and the outer edges of the red or blue tape lines surrounding each Loader.
Match - A set time period, consisting of an Autonomous Period and/or Driver Controlled Periods, during which Teams play a defined version of Override to earn points.
Match types:
- Autonomous Coding Skills Match - A Robot Skills Match in which a single Robot operates during a one minute Autonomous Period. There is no Driver Controlled Period. Teams can elect to end an Autonomous Coding Skills Match early if they wish to record a Skills Stop Time.
- Driving Skills Match - A Robot Skills Match in which one Team operates their Robot during a one minute Driver Controlled Period. There is no Autonomous Period. Teams can elect to end a Driving Skills Match early as described in rule <RSC5> if they wish to record a Skills Stop Time.
- Elimination Match - A Head-to-Head Match used in the process of determining the champion Alliance. Alliances of two (2) Teams face off according to the Elimination Bracket ; the winning Alliance moves on to the next round.
- Head-to-Head Match - A Match that consists of two Alliances that work to outscore the other Alliance in a two-minute Match. Qualification Matches, Finals Matches, and optional Practice Matches are Head-to-Head Matches.
- Practice Match - A non-scored Head-to-Head Match used to provide time for Teams to get acquainted with the official playing Field and procedures. Head Referees should not record or track standard gameplay Violations that occur during Practice Matches. Egregious Violations may be recorded and tracked at the discretion of the Head Referee.
- Qualification Match - A Head-to-Head Match that is used to determine Teams’ rankings for Alliance Selection. Each Qualification Match consists of two Alliances competing to earn Win Points, Autonomous Points, and Strength of Schedule Points.
- Robot Skills Match - A Driving Skills Match or Autonomous Coding Skills Match.
Match Type |
Participants |
Specific Rules |
Autonomous Period (m:ss) |
Driver Controlled Period (m:ss) |
Two Alliances (red/blue) each composed of two Teams, with one Robot each |
Scoring (“SC”), General Game (“GG”) and Specific Game (“SG”) sections |
0:15 |
1:45 |
|
One Team, with one Robot |
Section 3 |
None |
1:00 |
|
One Team, with one Robot |
Section 3 |
1:00 |
None |
|
|
VEX U Robotics Competition Head-to-Head Match |
Two Teams (red/blue), with two Robots each |
Section 6 |
0:30 |
1:30 |
|
VEX U Robotics Competition Driving Skills Match |
One Team, with two Robots |
Section 6 |
None |
1:00 |
|
VEX U Robotics Competition Autonomous Coding Skills Match |
One Team, with two Robots |
Section 6 |
1:00 |
None |
Match Load - One of the 20 Cups, 10 per Alliance, or 22 Pins, 11 per Alliance, that begin the Match in an Alliance Station and which may be introduced during the Match. See rule <SG11>.
Match Schedule - A list of Matches that is generated at the start of an event. The Match Schedule includes the predetermined, randomly-paired Alliances that will be competing in each Qualification Match, and the expected start times for these Matches. The Match Schedule may be subject to change at the Event Partner’s discretion.
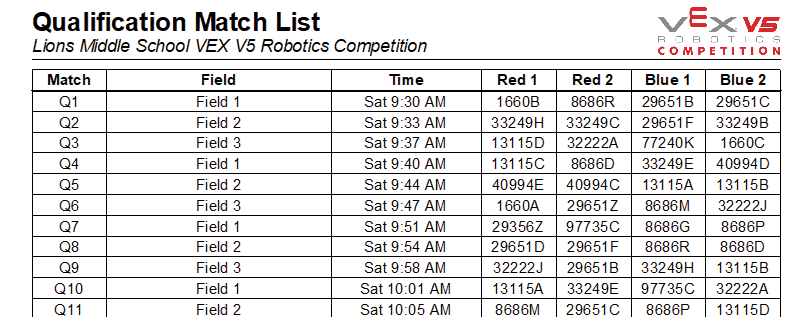
Figure MS-1: An example of a Qualification Match Schedule
Midfield - The center square-shaped area of the Field in which Robots attempt to end the Match to score additional points. The Midfield is defined by the outer edge of the white tape line square, and can be entered by all Robots during the Autonomous Period. See Figure Q-1.
Notebooker - Any Student Team member who contributes to the Team’s engineering notebook or associated documentation. Adults are permitted to teach Notebookers associated concepts, but should never work on the engineering notebook or other documentation.
Offensive - A category of strategies, Robot actions, and/or Robot statuses that can be employed by a Team during a Match ; see rules <GG14> and <GG15> for more information. A Robot is Offensive while it is engaged in actions that could directly increase its Alliance’s score for the current Match. Examples include, but are not limited to:
- Adding a Scoring Object to a Goal to score points
- Moving toward a Goal with a Scoring Object that could earn points for their Alliance
- Changing the status of a Toggle
- Achieving (or attempting to achieve) any Robot status that adds points to their Alliance’s score
- Obtaining (or attempting to obtain) Scoring Objects
Owned - A yellow Pin status. A Placed yellow Pin is Owned by an Alliance if the Toggle in that Quadrant is set to the Alliance’s color.
Placed - A Scoring Object status. See <SC2>.
Plowing - A Robot / Scoring Object status. A Robot is considered to be Plowing a Scoring Object if the Robot is intentionally moving it in a preferred direction with a flat or convex face of the Robot or with another Scoring Object.
Pin - A Scoring Object measuring approximately 1.6” (40mm) in diameter and 6.5” (165mm) tall. Each Pin consists of two halves, and each half is red, blue, or yellow.
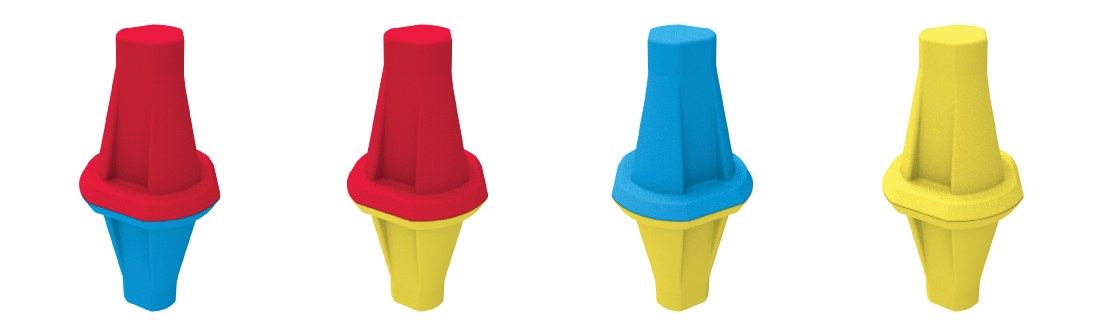
Figure P-1: The four types of Pins in a V5RC Override Match
Possession - A Robot / Scoring Object status. A Scoring Object is considered Possessed by a Robot if a Robot’s change in direction would result in controlled movement of the Scoring Object. This typically requires at least one of the following to be true:
- The Scoring Object is fully supported by the Robot
- The Robot is moving the Scoring Object in a preferred direction with a concave face of the Robot (or inside of a concave angle formed by multiple mechanisms/faces of the Robot )
- The Robot is holding the Scoring Object against the Floor or a Field Element
The difference between Possession and Plowing is analogous to the difference between the terms “controlling” and “moving.
Preload - The Pins, one (1) per Robot, placed by each Team prior to the start of each Match. See <SG5>.
Quadrant - One of four designated triangular areas of the Field. Each Quadrant contains two Goals and one Toggle. Robots may score Pins in the Goals within a Quadrant and may attempt to set that Quadrant’s Toggle to control ownership of yellow Pins Scored in that Quadrant.
A Quadrant is defined by the outer edges of the white tape lines, the Field Perimeter, and the colored tape that defines the Load Zones.
Each Quadrant is described as red or blue based on the Alliance-colored Goal it includes. See Figure Q-1.
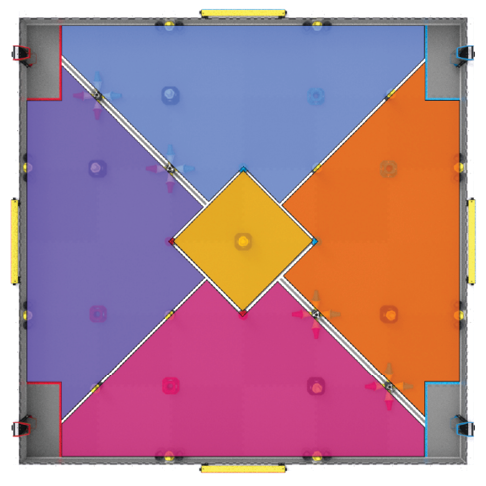
Figure Q-1: An overhead view of the Override Field with the four Quadrants (blue, purple, pink, orange) and Midfield (yellow) highlighted.
Qualification Match - see Match.
Robot - A machine that has passed inspection, designed by Student Team members to execute one or more tasks autonomously and/or by remote control from a Drive Team Member.
Robot Skills Match - see Match.
Scoring Object - A Cup or Pin.
Scored - A Scoring Object status. See <SC3>.
Scorekeeper Referee - An impartial volunteer responsible for tallying scores at the end of a Match. Scorekeeper Referees do not make ruling interpretations, and should redirect any Team questions regarding rules or scores to a Head Referee.
Skills Stop Time - The time remaining in a Robot Skills Match when a Team ends the Match early. See <RSC5> for more details.
Strategist - Any Student Team member who contributes to the Match strategies used to score points during a Qualification Match or Robot Skills Match, including assessing the impact of other Teams’ performance and strategies on the Team’s strategy (e.g., scouting). Adults are permitted to teach Strategists associated concepts, but should never create or dictate a Team’s Match strategy.
Strength of Schedule Points (SP) - The third basis of ranking Teams. Strength of Schedule Points are equivalent to the score of the losing Alliance in a Qualification Match. In the event of a tie, both Alliances receive Strength of Schedule Points equal to the tie score. If both Teams on an Alliance are Disqualified, the Teams on the not Disqualified Alliance will receive their own score as Strength of Schedule Points for that Match.
Student - A person is considered a Student if they meet both of the following criteria:
- Anyone who is earning or has earned credit toward a secondary school (i.e., high school) diploma, certificate, or other equivalent during the six (6) months preceding the VEX Robotics World Championship. Courses earning credits leading up to high school would satisfy this requirement.
- Anyone born after May 1, 2007 (i.e., who will be 19 or younger at VEX Worlds 2027). Eligibility may also be granted based on a disability that has delayed education by at least one year.
Team - One or more Students make up a Team. In the context of this game manual, Student Team members fill multiple roles related to Robot design, build, coding, strategy, and documentation. See <G2>, <G4>, <G5> for more information. Adults may not fulfill any of these roles. See Appendix D for more information about Team classifications and Student roles.
Time-out - A single break period no greater than three minutes (3:00) allotted for each Alliance during the Elimination Bracket. See <GG7>.
Toggle - One of four (4) triangular shaped Field Elements mounted to the Field Perimeter that can be Owned to control yellow Pins Scored in the corresponding Quadrant. Each Toggle has 3 sides that, when viewed from inside the Field, indicate which Alliance Owns the Toggle. Toggles are 25.8” (656.2mm) long and each face of the triangle is approximately 2.05” (52.2mm) wide. See <SC4> for more information.
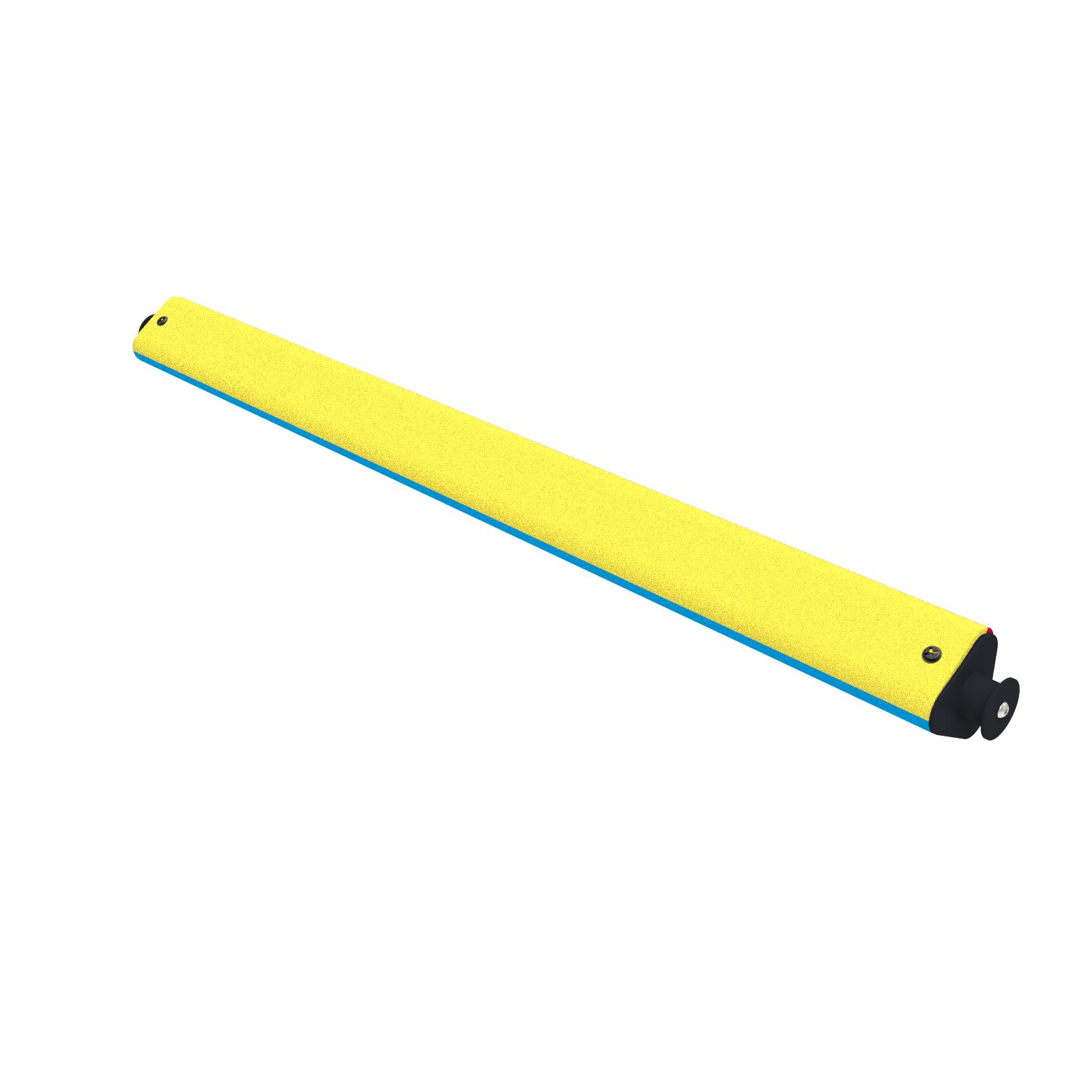
Figure T-1: A Toggle
Tournament - A competition event that includes scored Matches, and which is run by an Event Partner.
Violation - The act of breaking a rule in the game manual. See Appendix C for additional information on Violations and penalties.
- Minor Violation - A Violation which does not result in a Disqualification.
- Major Violation - A Violation which results in a Disqualification.
- Match Affecting - A Violation which changes the winning and losing Alliance in the Match.
Win Percentage (WP) - Replaces Win Points in a league event. Win Percentage is calculated by the number of wins divided by the number of Qualification Matches the Team plays. In cases of a tie, the Team is given a 0.5 number of “wins” for that Match. The Autonomous Win Point is also considered 0.5 “wins,” added to the total number of wins.
Win Points (WP) - The first basis of ranking Teams. Teams will receive zero (0), one (1), two (2), or three (3) Win Points for each Qualification Match. Unless a Team is Disqualified, both Teams on an Alliance always earn the same number of Win Points.
- One (1) Win Point is awarded for completing the Autonomous Win Point task(s).
- Two (2) Win Points are awarded for winning a Qualification Match.
- One (1) Win Point is awarded for tying a Qualification Match.
- Zero (0) Win Points are awarded for losing a Qualification Match.
Appendix C - Rule Violations
This appendix is intended to provide additional guidance regarding rule Violations within the VEX V5 Robotics Competition, and offer further explanation on how Violations may be interpreted and enforced during Matches. It is designed to promote consistency in officiating and to help Teams better understand how actions on the Field may impact scoring, Match outcomes, and referee decisions.
All Violation Notes to denote special circumstances or provide additional clarifications have been consolidated into this section such that they may be easily referenced. If no Violation Notes are found in a given rule, then it should be assumed that the below “default” definitions apply.
This appendix does not supersede any existing rule, but instead serves as a secondary resource to aid in their application.
Violation - The act of breaking a rule in the Game Manual.
- Minor Violation - A Violation which does not result in a Disqualification.
- Accidental, momentary, or otherwise non Match Affecting Violations are usually Minor Violations.
- Minor Violations usually result in a verbal notification from the Head Referee during the Match, which should serve to inform the Team that a rule is being Violated before it escalates to a Major Violation.
- Major Violation - A Violation which results in a Disqualification.
- Unless otherwise noted in a rule, all Match Affecting Violations are Major Violations.
- If noted in the rule, egregious or strategic Violations or intentional actions that result in Violations may also be Major Violations.
- Multiple Minor Violations within a Match or Tournament may escalate to a Major Violation at the Head Referee’s discretion or as specified in a rule. Minor Violations carry over into Elimination Matches unless otherwise specified within a rule.
- Match Affecting - A Violation which changes the winning and losing Alliance in the Match.
- Multiple Violations within a Match can cumulatively become Match Affecting.
- When evaluating if a Violation was Match Affecting, Head Referees will focus primarily on any Robot actions that were directly related to the Violation.
- Determining whether a Violation was Match Affecting can only be done once the Match is complete and the scores have been calculated.
- To determine whether a Violation may have been Match Affecting, check whether the Team who committed the Violation won or lost the Match. If they did not win the Match, then the Violation could not have been Match Affecting, and it was very likely a Minor Violation.
Violation Notes by Rule
Specific Game Rules
- The Match will not begin with any conditions in this rule unmet. If a Robot cannot meet these conditions in a timely manner, the Robot will be removed from the Field and rules <R2d> and <GG2> will apply until the situation is corrected. They will not receive a Disqualification, but should receive a Minor Violation and will not be permitted to play in the Match.
- Incidental/insignificant infractions that occur during a Match are only considered Minor Violations. Repeated Minor Violations should only escalate to a Major Violation in extreme circumstances. Examples of Minor Violations include, but are not limited to:
- Loose wires
- Broken zip ties / rubber bands
- Bent or broken mechanical components that are not used for strategic gain
- Due to the difficulty of determining Match Affecting implications of this rule, most Violations should be considered Minor. However, blatantly intentional and/or Match Affecting Violations (especially during Elimination Matches ) may still immediately escalate to a Major Violation at the Head Referee’s discretion.
- See <SG1>.
- All Violations of this rule (Major or Minor) will result in the Autonomous Bonus being awarded to the opposing Alliance. See <SG8b> for a potential exception caused by Autonomous Line interactions.
- Intentional, strategic, or egregious Violations, such as intentional contact with an opposing Robot while contacting the foam tiles on the opposing side of the Autonomous Line, or the interactions described in <SG7e> will be considered Major Violations and should result in a Disqualification for the Match.
- Deliberate Defensive Autonomous strategies, as described in <SG7a>, may also be recorded as <G1> Violations at the Head Referee’s discretion.
- Incidental interactions, such as unintentional contact with the Goal and/or Scoring Objects stacked on the Goal, should typically be considered Minor Violations.
- Intentional interactions, as well as any interactions (intentional or unintentional) involving the addition or removal of Scoring Objects on the Goal, will be considered Major Violations.
- Violations should be considered Match Affecting if the offending Team’s Alliance ties or wins the Match by 15 points or less, unless the Head Referee can indisputably determine that the Violation did not affect the outcome of the Match. (Note: Teams should not expect a Head Referee to be capable of determining whether a Violation affected the outcome of a Match in most instances.)
- Intentional, strategic, or egregious Violations will be considered Major Violations.
- Repeated Minor Violations can escalate to a Major Violation at the Head Referee’s discretion, especially in cases where Violations occur after multiple prior warnings
- For the purposes of Match Affecting calculations, each illegal Match Load should be considered worth a value of 3 points. These values are not added to the actual score. If subtracting 3 points per illegal Match Load from the offending Alliance’s final score would change the outcome of the Match, then the <SG11> Violation should be considered Match Affecting.
- For the purposes of this rule, the following guidelines should be used for escalating repeated Minor Violations to a Major Violation during Qualification Matches:
- Six or more illegal Match Loads in a single Qualification Match.
- Three or more Qualification Matches with at least one illegal Match Load (i.e., the third Match and all subsequent Matches with a Violation ).
- For the purposes of this rule, only Match Affecting Violations should be considered during Elimination Matches (i.e., repeated Minor Violations in Elimination Matches do not compound to Major Violations ).
- Point 2a does not explicitly apply during Elimination Matches, although the risk of illegal Match Load becoming Match Affecting still inherently increases as the quantity of Match Loads increases.
- Point 2b does not apply during Elimination Matches.
- Most Violations of this rule should be considered Minor Violations. However, repeated Minor Violations can escalate to a Major Violation at the Head Referee’s discretion, especially in cases where Violations occur after multiple prior warnings.
- Violations involving Pins Placed on the Midfield Goal that change the outcome of the Match in favor of the offending Robot’s Alliance will be considered Match Affecting Violations.
- Egregious Violations, will be considered Major Violations.
- Repeated Minor Violations can escalate to a Major Violation at the Head Referee’s discretion, especially in cases where Violations occur after multiple prior warnings.
General Rules
- Any Violation of <G1> may be considered a Major Violation and should be addressed on a case-by-case basis. Teams at risk of a <G1> Major Violation due to multiple disrespectful or uncivil behaviors will usually receive a “final warning”, although the Head Referee is not required to provide one.
- Potential Violations of this rule will be reviewed on a case-by-case basis. By definition, all Violations of this rule become Match Affecting as soon as a Robot which was built or programmed by an Adult scores points in a Match.
- Teams believed to be in Violation of this rule should be reported to the Judge Advisor, Head Referee, or Event Partner for further investigation in coordination with VEX Robotics. Based on the investigation the Team may be removed from further Matches, have their Robot Skills Match scores removed, and/or be removed from consideration from judged awards.
- Violations of this rule will be evaluated on a case-by-case basis, in tandem with VEX Robotics as noted in <G1> and <G2>.
- A Team that circumvents a Robot rule for a competitive advantage should receive an immediate Disqualification for the current Match.
General Game Rules
- Major Violations of this rule are not required to be Match Affecting, and could invoke Violations of other rules, such as <G1>, <G2>, or <G4>.
- Major Violations of this rule should be rare, as Robots should never be designed to intentionally violate it. Minor Violations are usually due to Robots being damaged during gameplay, such as a wheel falling off.
- The intent of this rule is to ensure that Robots abide by commands sent by the tournament software. Temporarily removing the cable to assist with mid-Match troubleshooting, with an Event Partner or other event technical staff present and assisting, would not be considered a Violation.
- See <GG13>.
- In general, Minor Violations of SG rules that occur during the Autonomous Period should only affect the outcome of the Autonomous Period (i.e., the Alliance can’t win the Autonomous Bonus or earn an Autonomous Win Point ) and should not be considered when determining whether a Violation has been repeated during the event.
- If a Head Referee determines that a Violation of an SG or GG rule during the Autonomous Period was intentional/strategic rather than accidental/situational, it should be recorded as a Minor Violation or Major Violation and considered when determining whether a Violation has been repeated during the event.
- Major Violations of this rule are not required to be Match Affecting. Intentional and/or egregious tipping, Entanglement, or damage may be considered a Major Violation at the Head Referee’s discretion.
- Repeated Violations within a Match or Tournament could be considered a Violation of <G1> and/or <S1> at the Head Referee’s discretion.
- In most cases, if a Team causes their opponent to break a rule, the Head Referee will simply not enforce the penalty on that opponent, and it will be considered a Minor Violation for the Team that forced a Violation. However, if the forced situation becomes Match Affecting in favor of the Team that forced the Violation, it will be considered a Major Violation for the Team that forced the Violation.
- When determining whether a Holding Violation was Match Affecting, they should consider the full context of the Match and both Robots’ actions, including the following. Because the first three seconds of a Hold are legal game play and not a Violation, only the extended portion of a Hold should be considered. Holding is an inherently Defensive action, so rule <GG15> may also be considered if a judgment call is required.
Robot Rules
- Teams must replace broken plastic pieces that result in temporary, unintentional <R24> Violations.
Appendix D - Team Classifications and Student Roles
One or more Students make up a Team. To participate in an official VEX V5 Robotics Competition event, a Team must first register on events.vex.com and receive a VEX V5 Robotics Competition Team number. A Team’s unique number identifies their organization and their Team within that organization. Each Team must design and build their own Robot, create their own code, develop their own strategies to play the game, and maintain their own engineering notebook if they choose to use one.
- A Team is classified as a Middle School Team if all members are Middle School Students.
- A Team is classified as a High School Team if any of its members are High School Students, or if the Team is made up of Middle School Students who declare themselves “playing up” as High School Students by registering their Team as a High School Team.
- Once a Team has competed in an event as a High School Team, that Team may not change back to a Middle School Team for the remainder of the season. If a Team mistakenly registers as a Middle School Team but is ineligible for that age group, their registration may be revised mid-season with the assistance of VEX Robotics; all prior qualifications for the season will be lost.
- Teams may be associated with schools, community/youth organizations, or groups of neighborhood Students.
In the context of this Game Manual, Student Team members fill multiple roles related to Robot design, build, coding, strategy, and documentation. See <G2>, <G4>, <G5> for more information. Adults may not fulfill any of these roles.
- Designer - Any Student Team member who helps design the Robot to be built for competition. Adults are permitted to teach Designers associated concepts, but should never work on the design of the Robot.
- Builder - Any Student Team member who helps build the Robot. Adults are permitted to teach Builders associated concepts, but should never work on the Robot.
- Coder - Any Student Team member who contributes to the computer code that is downloaded onto the Robot. Adults are permitted to teach Coders associated concepts, but should never work on the code that goes on the Robot.
- Strategist - Any Student Team member who contributes to the Match strategies used to score points during a Qualification Match or Robot Skills Match, including assessing the impact of other Teams’ performance and strategies on the Team’s strategy (e.g., scouting). Adults are permitted to teach Strategists associated concepts, but should never create or dictate a Team’s Match strategy.
- Notebooker - Any Student Team member who contributes to the Team’s engineering notebook or associated documentation. Adults are permitted to teach Notebookers associated concepts, but should never work on the engineering notebook or other documentation.