





























Analog Accelerometer V1.0
Measures accelerations on three axes simultaneously. By measuring the acceleration of the robot, one can calculate the velocity of the robot or the distance this robot has traveled. Accelerometers are also great for detecting collisions and determining if the robot is stopped or moving.
- Three Axis Accelerometer
- Selectable sensitivity via jumper: ±2g and ±6g
- 0-5V analog output (one for each axis)
- Uses the LIS344ALH chip
- LED indicates power and proper connection
- Mounts directly to robot
The LIS344ALH capacitive micromachined accelerometer features signal conditioning, a 1-pole low pass filter, temperature compensation and g Select which allows for the selection among 2 sensitivities. Zero-g offset full scale span and filter cut-off are factory set and require no external devices.
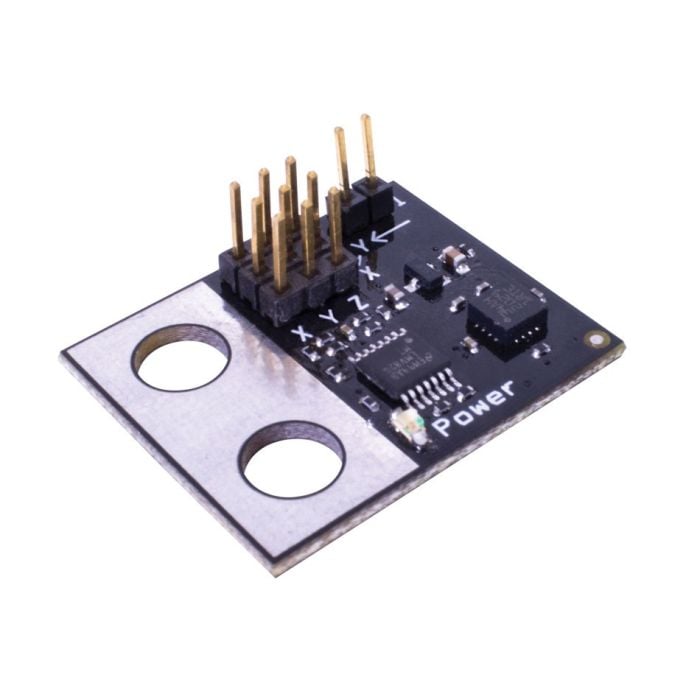
The sensor will measure acceleration in both directions along each of the 3 axis. Acceleration along the X or Y axis in the direction of the silkscreened arrows will produce a larger reading, while acceleration in the opposite direction will produce a smaller reading. For the Z axis, upward acceleration (in the direction of the board's face) produces larger values, and downward acceleration (toward the board's back) produces lower values.
Gravity is indistinguishable from upward acceleration, so the sensor will detect a constant 1.0G while at rest. If the board is mounted horizontally, gravity will effect only the Z axis. If the sensor is tilted away from the horizontal, the gravity reading on the Z axis will diminish, and the readings on the other axis will change depending on which way you are tilting it.
Each channel used must be connected to an analog input on the VEX microcontroller using a standard servo extension cable. You don't have to hook up all the channels; you only need to connect the ones required for your application. The white (signal) wire of each extension cable goes near the 'X', 'Y', or 'Z' silkscreened on the board. The black (ground) wires go at the other end, adjacent to the 'B' silkscreened on the board. The center wire is for +5 volts. Also, the mounting holes are electrically isolated from the circuit.
The accelerometer has two sensitivity ranges, selected by a jumper. Pin 1 of the Jumper (the pin closest to the "Y" marking) connects directly to the LIS344ALH with a 1K pulldown resistor. Pin 2 of the Jumper connects to +3.3 volts. The easy way to remember the jumper settings is to add the values of the installed jumper; The larger the sum, the larger the range.
Jumpers | Sum | Range | Output (-1g to +1g) |
None | 0 | +/- 2.0g | 1.6 volts to 3.4 volts |
1 only | 1 | +/- 6.0g | 2.2 volts to 2.8 volts |
You can control the Sensitivity Ranges remotely by connecting your control signal to pin 1 of the Jumpers. The Max Input voltage for the Jumpers is +3.3 Volts. For more details, please refer to the data sheet on the STMicroelectronics LIS344ALH chip.
- (1) Accelerometer
- (1) Jumper
- 0.01 lbs
- Black: Ground
- Red: +5V
- 0.100 spaces pins (3 rows)
- Connect to one analog input per axis (cables not included)
- White: Output signal
Click the button next to a file to view it in your browser.
- Compatible with all VEX Microcontrollers and 3-Wire Extension Cables