






























Inertial Sensor
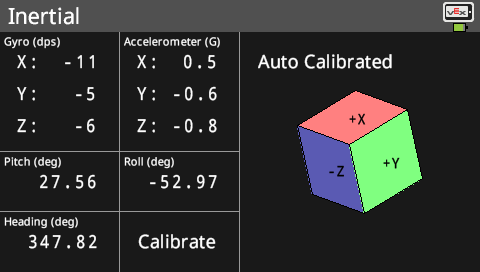
The Inertial Sensor is a combination of a 3-axis (X,Y, and Z) accelerometer and a 3-axis gyroscope. The accelerometer measures linear acceleration of the robot (including gravity), while the gyroscope electronically measures the rate of rotation about the V5 inertial sensor three-axis.
The combination of these two devices in one sensor allows for effective and accurate navigation, as well as controlling any change in the motion of a robot.
Accelerometer: The accelerometer measures how fast the sensor changes its motion (accelerates) along the X axis, the Y axis, and/or the Z axis. These axis are determined by the orientation of the Inertial Sensor. For example, one orientation could have a robot’s X axis as its forward and backwards motion, its Y axis as its side to side motion, and its Z axis as its up and down motion (such as the robot lifting itself up off the field on a hanging bar).
Gyroscope: The gyroscope, rather than measuring linear motion along the 3 axis, it measures the rotational motion around the three axis. The sensor measures this rotation when the internal electronics creates a fixed reference point. As the sensor rotates away from this reference point it changes the output signal.
It takes a short period of time for a gyroscope to establish its reference point. This is commonly called the initialization or startup time.
- (1) V5 Inertial Sensor
- 0.06 lbs (0.03 kgs)
Click the button next to a file to view it in your browser.